






G4st0n, bras robotisé
Page 11 sur 15 •  1 ... 7 ... 10, 11, 12, 13, 14, 15
1 ... 7 ... 10, 11, 12, 13, 14, 15 

 Re: G4st0n, bras robotisé
Re: G4st0n, bras robotisé
![]() toutenbois Mer 1 Juin 2016 - 17:21
toutenbois Mer 1 Juin 2016 - 17:21
toutenbois- complétement accro

- Messages : 2049
Date d'inscription : 13/09/2013 -


Re: G4st0n, bras robotisé
![]() ricoud Mer 1 Juin 2016 - 17:49
ricoud Mer 1 Juin 2016 - 17:49
il a des mouvement pas encore un peu désordonnée...

ricoud- complétement accro
- Messages : 1491
Points : 1842
Date d'inscription : 04/01/2014
Age : 45
Localisation : Nord Isere
Re: G4st0n, bras robotisé
![]() F6FCO Mer 1 Juin 2016 - 19:36
F6FCO Mer 1 Juin 2016 - 19:36
Mais c'est bon il a déjà un peu grandi:
Quand même des petits soucis de jeunesse:
1) quand il est complètement déplié en position basse il a un peu de mal à remonter, je vais lui rajouter un ressort de rappel comme j'avais fais sur mon premier bras.
2) Sur la vidéo on voit qu'il n'y a que deux segments qui fonctionnent, celui du bout n'est pas opérationnel pour l'instant parce que son capteur de POM a rendu l'âme. Je les avais pourtant testés tous les trois avant de les poser. Le souci c'est que je n'en ai pas d'autre de ce modèle, tous ceux qui me restent sont des petits.
Donc tout fonctionne au poil à part çà et je suis obligé de mettre le projet en stand-by en attendant de trouver un autre capteur opto.


F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Jeu 2 Juin 2016 - 23:31
F6FCO Jeu 2 Juin 2016 - 23:31
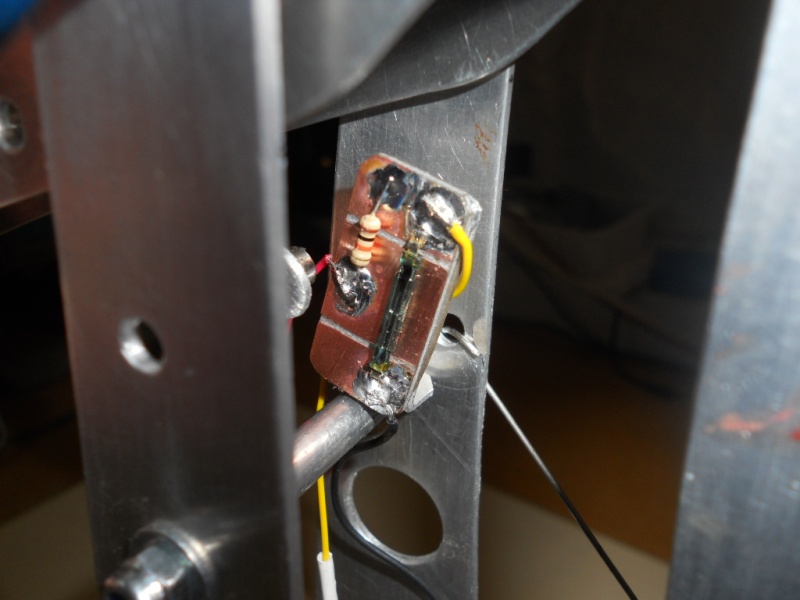
Pour remplacer la fourche opto HS qui me manquait j'ai fabriqué un capteur avec une ampoule ILS. Çà marche au poil si on ne tient pas compte de la mocheté des soudures parce que j'ai quand même du souder/dessouder plusieurs fois sur la bête pour mettre çà au point.
Et le testeur TTL m'a bien servi pour faire ce boulot
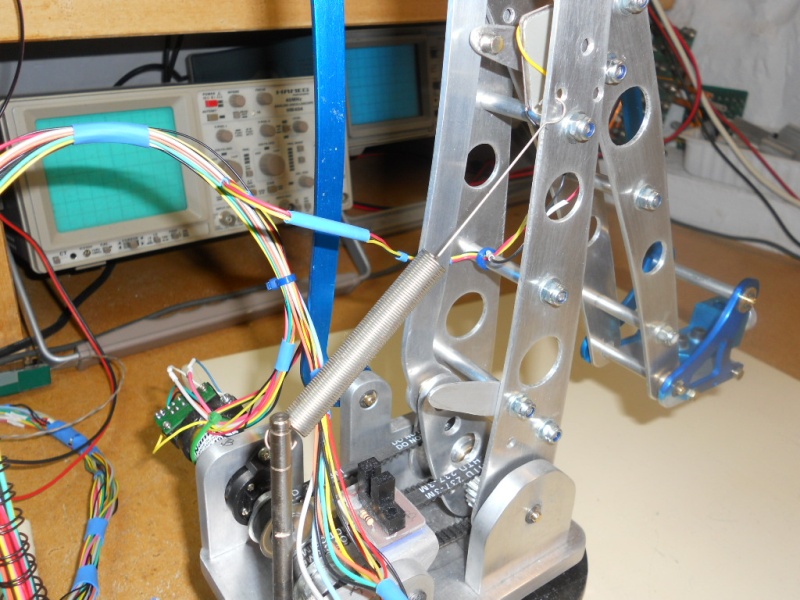
Et pour l'autre souci, le manque de force du moteur pour relever le bras en plein extension je lui ai rajouté un ressort d'aide, çà marche au poil.
En plus l'ILS c'est ce genre de capteur que j'ai monté sur ma CNC béton et le coup du ressort je l'avais déjà utilisé sur mon premier bras. Je devais être bien cuit hier soir pour ne pas y avoir pensé.

Ferais une vidéo demain. Faire dormir les yeux là.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() athanase Ven 3 Juin 2016 - 8:11
athanase Ven 3 Juin 2016 - 8:11
Je vais relire tout ça ce weekend.
Bravo, à ce rythme il va bientôt pouvoir aller à la maternelle et tenir son premier crayon
C'est l'heure d'aller bosser....
athanase- complétement accro
- Messages : 648
Points : 1160
Date d'inscription : 10/01/2014
Age : 54
Localisation : Tarn
Re: G4st0n, bras robotisé
![]() bilou(te) Ven 3 Juin 2016 - 8:50
bilou(te) Ven 3 Juin 2016 - 8:50
Quand je lis ça :
Pour remplacer la fourche opto HS qui me manquait j'ai fabriqué un capteur avec une ampoule ILS. Çà marche au poil si on ne tient pas compte de la mocheté des soudures parce que j'ai quand même du souder/dessouder plusieurs fois sur la bête pour mettre çà au point.
Et le testeur TTL m'a bien servi pour faire ce boulot Very Happy
Je me dis qu'on n'a pas tous les mêmes compétences !
Et pourtant, il y a encore 3 ou 4 ans, j'étais pas trop une buse en électronique (théorique, du moins).
Félicitations !
bilou(te)- complétement accro
- Messages : 1804
Points : 3079
Date d'inscription : 28/08/2013
Age : 40
Localisation : Gironde, dans la banlieue bordelaise
Re: G4st0n, bras robotisé
![]() F6FCO Ven 3 Juin 2016 - 13:38
F6FCO Ven 3 Juin 2016 - 13:38
- une fourche opto, une led qui rend une jonction passante dés qu'elle s'éclaire. Led éteinte jonction coupée, led allumée jonction passante (un fil). Bref, un interrupteur commandé par la lumière.
- un relais ILS, un bilame enfermé dans une ampoule de verre, coupé au repos. Tu approches un aimant et les lames collent. Tu remplaces la led par un aimant, la jonction par un ILS et çà fait le même boulot.
Ce que j'ai fais sur ma CNC et sur le bras.
Voilà G4st0unet complètement valide
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() meles Ven 3 Juin 2016 - 17:34
meles Ven 3 Juin 2016 - 17:34
@+

meles- Admin

- Messages : 14932
Points : 21889
Date d'inscription : 13/05/2011
Localisation : Aubagne
Re: G4st0n, bras robotisé
![]() JPierre62 Ven 3 Juin 2016 - 19:40
JPierre62 Ven 3 Juin 2016 - 19:40
Tu lui ajoutes une pelle au bout du bras et tu peux distribuer des "smartis" à tes petits enfants !
Génial F6FCO !
J'attends le stylo qui dessine et écrit tout seul !
J.Pierre

JPierre62- complétement accro
- Messages : 1100
Points : 1123
Date d'inscription : 24/02/2012
Age : 72
Localisation : Calonne-Ricouart - Pas de Calais
Re: G4st0n, bras robotisé
![]() F6FCO Ven 3 Juin 2016 - 20:56
F6FCO Ven 3 Juin 2016 - 20:56
Les moteurs font 16kg de torque, avec la démultiplication 1/1.5 çà leur fait 24Kg. Ce qui ne l'empêchait pas pourtant d'être faible pour le relevage en extension. Mais quand tout est replié il est féroce.Il a la pêche, le fils de Sam va s'éclater avec un engin pareil !
C'est le but avouéJ'attends le stylo qui dessine et écrit tout seul ! Very Happy
Partie mécanique OK.
Partie électronique OK.
Reste la partie programmation à faire. Çà risque de ne pas être simple cette affaire, et puis avec les beaux jours je vais peut-être moins m'y tenir. Mais çà va être super intéressant.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() JPierre62 Sam 4 Juin 2016 - 8:11
JPierre62 Sam 4 Juin 2016 - 8:11
F6FCO a écrit:Les moteurs font 16kg de torque, avec la démultiplication 1/1.5 çà leur fait 24Kg. Ce qui ne l'empêchait pas pourtant d'être faible pour le relevage en extension. Mais quand tout est replié il est féroce.Il a la pêche, le fils de Sam va s'éclater avec un engin pareil !C'est le but avouéJ'attends le stylo qui dessine et écrit tout seul ! Very Happy, on verra bien si j'y arrive.
Partie mécanique OK.
Partie électronique OK.
Reste la partie programmation à faire. Çà risque de ne pas être simple cette affaire, et puis avec les beaux jours je vais peut-être moins m'y tenir. Mais çà va être super intéressant.
Bonjour JC
Pour écrire , ne pourrais-tu pas passer par un dxf>cambam>Mach3 , comme moi , j'écris avec ma CNC comme ça !
Mais pour d'autres utilités , ca vas pas le faire !
Mais je sais que tu vas nous trouver un "Truc" !
Tes neurones , vont encore bien fonctionner !
Au plaisir de te lire !
J.Pierre
JPierre62- complétement accro
- Messages : 1100
Points : 1123
Date d'inscription : 24/02/2012
Age : 72
Localisation : Calonne-Ricouart - Pas de Calais
Re: G4st0n, bras robotisé
![]() junkdealer Sam 4 Juin 2016 - 9:29
junkdealer Sam 4 Juin 2016 - 9:29
F6FCO a écrit: ....... et puis avec les beaux jours je vais peut-être moins m'y tenir. Mais çà va être super intéressant.
et dis voir, file un peu ton adresse, j'arrive
tu serais pas en bretagne ???
sinon, ecrire en "coordonnees polaires", beau projet pour les longues soirees pluvieuses

junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() F6FCO Dim 5 Juin 2016 - 0:22
F6FCO Dim 5 Juin 2016 - 0:22
. Je ne sais pas trop encore, je change un peu d'idée chaque jour. Ce que j'aimerais c'est de le faire dessiner, mais peut-être que je met la barre un peu trop haut parce que je m'attaque à du rude
. Et à partir du moment ou il sait dessiner il est capable d'écrire.Toute la question est : comment s'y prendre.
Avant d'en arriver là il y a un gros challenge à gagner: arriver à maîtriser la cinématique inverse. Pour qui n'en aurait jamais entendu parler (ce qui est normal vu qu'on ne parle de çà pratiquement qu'en robotique ou animation 3D et qu'on ne soupçonne pas tant n'y a pas été confronté), une petite explication:
1 - La cinématique normale. La façon la plus facile d'animer un bras robot, c'est de faire comme dans ma dernière vidéo, on le fait bouger en poussant sur des boutons, clavier ou un joystick. Après tâtonnements on sait ou aller chercher le sucre et on sait ou aller au-dessus de la tasse de café. On anime manuellement le bras pour faire cette action. Pour moi ce n'est pas vraiment un bras robot mais plutôt un jouet télécommandé, ce qu'on voit le plus souvent sur le net. On doit vite se lasser !
2- La cinématique inverse. Ou alors on veut qu'il soit capable de faire quelque chose par lui-même. Exemple, on lui charge un fichier dessin et il dessine tout seul un portrait, pour cela il faut qu'il soit capable d'aller se positionner tout seul au bon endroit. Si il doit aller poser son stylo à tel point x,y,z de la feuille il faut qu'il soit capable de calculer lui-même en interne la façon d'y arriver. On lui fournit les coordonnées du point et il doit calculer les angles à donner aux trois segments pour atteindre précisément ce point. C'est çà la cinématique inverse. Et là y'a déjà un bon casse-croute.
Ça, çà va être le premier objectif de la partie programmation. Si j'arrive à gérer çà je réfléchirais alors à comment lui faire dessiner un truc.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Dim 5 Juin 2016 - 9:45
junkdealer Dim 5 Juin 2016 - 9:45
je suis d'accord, c'est un truc pour les soirees d'hiver, les coordonnees polaires
sauf que c'est bipolaire ton truc, comme moi
passer l'hiver en tripolaire, j'espere pour toi qu'il fera tres froid
quand tu arriveras déjà a lui faire décrire autre chose qu'un arc de cercle, tu auras fait 95% du boulot, vivement le premier segment de droite non colineaire au bras, celui là, il est presque trop simple, suffit de linéariser la hauteur, trois angles, deux rayons
plus j'ecris, plus j'y pense, et plus je choppe les subtilités qui t'attendent, vraiment joli programme
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() F6FCO Dim 5 Juin 2016 - 11:06
F6FCO Dim 5 Juin 2016 - 11:06
, si tu vas jeter un œil sur le net pour ce qui concerne la cinématique inverse tu prends mal à la tête. Des maths j'en ai fais un peu (pas trop) quand j'étais jeune mais là je ne suis plus jeune du tout et pas envie de me replonger dedans. Alors je vais essayer de m'en sortir avec le théorème d'Al kashi, un peu de trigo par ci, un peu de pythagore par là.Et comme tu dis, les deux segments du bras ne seront à mon avis pas trop difficiles à gérer mais çà va être une autre paire de manches pour y intégrer le mouvement de la base rotative.
Un autre point, c'est que n'importe quel microprocesseur ne sait que ajouter ou faire des décalages de bits pour faire une opération, alors dés qu'on veut utiliser une fonction mathématique dans le programme il se met à ramer car beaucoup d'opérations à effectuer. Et comme l'arduino n'est pas réputé pour être une F1, j'ai un peu peur du résultat, s'il faut 2heures pour dessiner un cercle...
. Çà je ne le saurais qu'après avoir essayé.Et puis oui il va falloir de loooongues soirées pluvieuses et surtout s'y tenir sans se disperser ailleurs. Pour exemple j'ai voulu remettre le nez dans l'asservissement des moteurs pour faire une modif, programme que j'ai pondu en février, ben je suis complètement paumé. Il est long compliqué, pas assez documenté et je n'y retrouve plus mon veau. A tel point que je me demande même si le plus simple ne serait pas de le réécrire
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Dim 5 Juin 2016 - 12:13
junkdealer Dim 5 Juin 2016 - 12:13
confronté en plein a deux adages :
il faut faire doucement, on est pressé
et
si j'avais eu le temps, je vous auai ecrit moins
en gros, qd on est pressé, on ne peut se permettre de faire des erreurs, donc faut y aller doucement, et si on avait eu le temps de relire ce qu'on a ecrit, on aurait eu le temps de faire plus clair en simplifiant
pour l'info, c'est imparable, le truc qui fonctionne en mode usne a gaz compréhensible quand on est dedans et qui devient une boite noire 2 semaines plus tard, alors que cela fonctionnerait avec 2 fois moins de ligne de code (et souvent aussi 2 fois plus vite) ecrits convenablement en prenant le temps
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() Marco66 Dim 5 Juin 2016 - 12:27
Marco66 Dim 5 Juin 2016 - 12:27
Pour tout ce qui précède, je n'ai rien à dire, c'est largement au dessus de mes connaissances.
Pour ce qui est de la programmation, il me semble que la base, c'est de faire des commentaires dans le code.
Je sais pas si c'est possible pour l'arduino, j'espère, sinon ce serait un raté.

Marco66- complétement accro
- Messages : 3976
Points : 4261
Date d'inscription : 04/05/2014
Age : 58
Localisation : Région nantaise
Re: G4st0n, bras robotisé
![]() F6FCO Dim 5 Juin 2016 - 16:12
F6FCO Dim 5 Juin 2016 - 16:12
Quand tu es en pleine immersion dans ton programme tout est simple et évident dans ta tête puisque c'est toi qui vient de le pondre, et du coup tu ne commentes que ce qui te parait nécessaire. Un peu comme les prises électriques dans une maison, on n'en met jamais assez.
On n'est plus dans le même esprit 4 mois après et une RAZ du cerveau
.En plus j'avais optimisé le code en remplaçant certaines instructions un peu lentes en utilisant les champs de bits, c'est super sur le moment mais çà rend le code encore plus illisible.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() Marco66 Dim 5 Juin 2016 - 16:30
Marco66 Dim 5 Juin 2016 - 16:30
Maintenant je mets plein de commentaires pour dire ce que ça fait par blocs.
Certains trucs, heureusement qu'ils marchent, j'aimerais pas remettre le nez dedans!
Et je suis bien loin de ce que tu programmes.
Bon courage! Ça marchera à la fin et
Marco66- complétement accro
- Messages : 3976
Points : 4261
Date d'inscription : 04/05/2014
Age : 58
Localisation : Région nantaise
Re: G4st0n, bras robotisé
![]() dh42 Dim 5 Juin 2016 - 20:14
dh42 Dim 5 Juin 2016 - 20:14
Oui, un joli casse tête de programmation ... et oui, les commentaires c'est indispensable et même, sauver un petit organigramme de la logique de la chose ne fait pas de mal pour s'y retrouver.
http://www.nchsoftware.com/chart/fr/index.html
je suppose que le principe, c'est de faire un Gcode banal avec CB par exemple, puis de le faire décoder par ton programme qui convertira les coord cartésiennes en polaire ?
++
David
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Dim 5 Juin 2016 - 21:03
F6FCO Dim 5 Juin 2016 - 21:03
La seconde idée c'est de coder un interpréteur gcode simple. On transforme l'image en gcode (çà je ne sais pas encore trop comment) et le bras pourrait fonctionner en faisant des dessins comme une CNC en traçant des cercles, des lignes, etc. Ca doit être super chouette à regarder
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() dh42 Dim 5 Juin 2016 - 21:15
dh42 Dim 5 Juin 2016 - 21:15
On transforme l'image en gcode (çà je ne sais pas encore trop comment) et le bras pourrait fonctionner en faisant des dessins comme une CNC en traçant des cercles, des lignes, etc.
A mon avis, il est bien plus simple de faire le Gcode sur la FAO, que ce soit pour extraire des lignes d'une image ou pour faire directement un dessin ; tu règle le PP pour qu'il ne sorte que des G0 G1 (les arcs sont convertis en une suite de lignes), de cette manière l'arduino n'a qu'a décoder du texte pour connaitre des coord XYZ de chaque segment de ligne ; décoder du texte qui te donne directement des coordonnées, c'est moins gourmand (et c'est plus simple) que de décoder une image et qui plus est d'extraire des contours de cette image. Le plus gros boulot serait donc une conversion de coordonnées ... ce qui n'est déjà pas rien.
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Dim 5 Juin 2016 - 23:09
F6FCO Dim 5 Juin 2016 - 23:09
Après pour la suite je pense pouvoir arriver à gérer ces G0 G1 avec l'arduino et amener le bras ou il faut.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() dh42 Dim 5 Juin 2016 - 23:25
dh42 Dim 5 Juin 2016 - 23:25
En clair tu dis que tu peux transformer une image en gcode G0/G1 avec Cambam ?
c'est la même chose qu'une détection de contour sur InkScape -> DXF -> cambam, puis application d'une op de gravure sur les polylignes obtenus dans CB.
la prochaine version de CB aura un numériseur intégré, donc il crée des polylignes à partir des contours d'une image, sans avoir à passer par un soft intermédiaire, mais au final, toi ce dont tu a besoin c'est d'un simple Gcode de gravure, exactement comme si tu gravais sur la CNc.
pour qu'un PP supprime ts les arcs et les remplace par des G1, dans le PP il faut mettre: (section option) Sortie des arcs -> convertir en lignes, c'est tout
fait une copie d'un PP simple (default par exemple) et modifie cette valeur (c'est le même réglage que pour un PP destiné à CNCWrapper ou au plugin Wrapper)
http://www.atelier-des-fougeres.fr/Cambam/Aide/cam/PostProcessor.htm
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Lun 6 Juin 2016 - 0:42
F6FCO Lun 6 Juin 2016 - 0:42
Un autre truc auquel je n'avais pas encore pensé c'est qu'il va falloir un support pour contenir le gcode, je vais m'intéresser à la manipulation des cartes SD qu'on peut greffer à l'arduino. Encore jamais joué avec çà.
ET... je vais aller me coucher avec le sourire, à force de m'abrutir dessus j'ai enfin tout RE-compris dans mon code du mois de février
Si on regarde la dernière vidéo on voit que les segments du bras retombent après chaque mouvement alors qu'ils devraient rester en position fixe. Je viens de dénicher le renard. En fait je cherchais un pbm qui n'avait rien à voir avec le code qui lui fonctionnait très bien, c'était juste une inversion de fils sur les capteurs opto. Des fois on se prend la tête...
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() dh42 Lun 6 Juin 2016 - 1:07
dh42 Lun 6 Juin 2016 - 1:07
Si l'arduino n'est pas assez rapide pour convertir du Gcode XYZ en Gcode ARZ** cela peut être fait par post traitement*** du Gcode sorti par CB.
** ARZ: je ne sais pas si ça existe, mais A= axe rotatif de la base , R= axe lineaire = extension du bras, Z = axe linéaire mouvement en hauteur
bien sur, R est une combinaison de 3 rotations qui donnent l'extension + le maintient à la verticale du stylo et même chose pour Z ; cela pourrait même être également pré-calculé de façon à sortir un Gcode qui donne directement les valeurs angulaires des 4 axes rotatifs (ABCD), de cette façon l'arduino ne fait que lire un Gcode 4 axes rotatifs et tourner les moteurs de la valeur donnée, sans avoir à faire de calculs autres que la converion angle -> nb de pas/dir sur le moteur.
*** post traitement
le PP de CB peut lancer un programme externe (.exe) juste après avoir sauvé le Gcode, c'est ce programme externe qui pourrait lire le Gcode XYZ généré par CB pour le transformer en Gcode ARZ ou ABCD. A écrire avec n'importe quel langage capable de gérer des paramètres en ligne de commande (VB, C, Python etc)
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Page 11 sur 15 • 1 ... 7 ... 10, 11, 12, 13, 14, 15

 Sujets similaires
Sujets similaires» support bras articulé
» Kity 439, un bras réglable en hauteur
» modifications sur scie radiale à bras
» Fixation bras motorisé sur portail