






G4st0n, bras robotisé
Page 13 sur 15 •  1 ... 8 ... 12, 13, 14, 15
1 ... 8 ... 12, 13, 14, 15 

 Re: G4st0n, bras robotisé
Re: G4st0n, bras robotisé
![]() F6FCO Ven 10 Juin 2016 - 14:54
F6FCO Ven 10 Juin 2016 - 14:54
F6FCO- complétement accro

- Messages : 4645
Date d'inscription : 13/05/2011 -


Re: G4st0n, bras robotisé
![]() junkdealer Ven 10 Juin 2016 - 18:11
junkdealer Ven 10 Juin 2016 - 18:11
F6FCO a écrit:Le truc çà va être de définir plein de points intermédiaires. Çà risque de ralentir pas mal le processus.
un niveau a bulle sur le porte stylo, et un asservissement auto pour garder la bulle de niveau
 avec un PID pour gerer
avec un PID pour gerer  le tout sur un arduino
le tout sur un arduino 
je t'avais souflé l'idée trois pages plus haut sur l'horizontalite du porte stylo
junkdealer a écrit:
je suis d'accord, c'est un truc pour les soirees d'hiver, les coordonnees polaires
sauf que c'est bipolaire ton truc, comme moi
du coup, je sors sors sors

junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() F6FCO Ven 10 Juin 2016 - 18:28
F6FCO Ven 10 Juin 2016 - 18:28
Oui j'en avais déjà vu des comme çà sur le net, c'est d'ailleurs un peu pour çà que je n'ai pas voulu faire comme eux
Pas grave, on va continuer comme çà pour voir ou çà nous emmène, c'est intéressant tout plein cette affaire
Ca doit se résoudre par le code en lui faisant faire en permanence des contrôles de Z et des corrections pendant les déplacements, c'est juste que çà m'inquiète pour la rapidité d’exécution, il va lui falloir 3 semaines pour faire un dessin. Ensuite quand je maîtriserai bien le concept je pourrai toujours migrer vers un Rasperry qui doit être plus rapide je pense mais comme je ne connais pas l'animal ni ne sait coder en serpent il y aura un gros temps de latence.

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() Wyldix Ven 10 Juin 2016 - 18:35
Wyldix Ven 10 Juin 2016 - 18:35
Le bras avec les segments évoluant sur un même plan est un bras SCARA et c'est plus facile à programmer et il y a déjà pas mal de choses faites puisque certaines imprimantes 3D fonctionnent avec cette architecture. Par exemple le contrôleur Smoothieboard le supporte.
En ce qui concerne un bras articulé, il y a Kuka qui a fait un très bon tutoriel sur le fonctionnement et il y avait un logiciel de démonstration (avec une simulation donc possibilité de voir le code qui contrôle les axes) open source mais je ne le retrouve pas. Par contre le tutoriel est disponible par ci par là en PDF. C'est en anglais mais il doit être possible de s'en sortir avec un traducteur.
Partie 1
Partie 2
Partie 3
Partie 4
C'est en tout cas la documentation la plus complète que j'ai pu trouvée. Mais ce n'est pas si simple que ça...
Bonne journée.

Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: G4st0n, bras robotisé
![]() junkdealer Ven 10 Juin 2016 - 19:01
junkdealer Ven 10 Juin 2016 - 19:01
un porte stylo autonivelant, monté sur gyroscope
ou la version basique, monté sur un axe de rotation qui ferait que par la magie de la gravité de la situation, il resterait toujours "de niveau", mais tu pourrais que tracer avec un mouvement parallele a l'axe
faut suivre, j'ai jamais dit que c'etait simple
et je suis encore sans alcool dans le sang, je le precise
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() F6FCO Ven 10 Juin 2016 - 19:40
F6FCO Ven 10 Juin 2016 - 19:40
Je vais reprendre un peu de Wildyx et scaratiser, si j'ai trop de pbm de mise au point avec mon bras actuel la solution sera simple, placer la feuille de dessin verticalement, le plan orienté // à l'axe central, rotate ne servira plus qu'à lever/baisser le crayon.
Çà me fera une espèce de bras SCARA placé verticalement.
Mouais, et puis même que je ne vais pas me prendre le chou et attaquer comme çà d'emblée. Juste le porte-crayon à modifier et faire un support pour la feuille.

Qu'est-ce que je disais plus haut, j'ai encore sauté sur Sketchup
Chassez le campeur, il revient au bungalow...
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Ven 10 Juin 2016 - 21:39
junkdealer Ven 10 Juin 2016 - 21:39
on peut faire des trucs impensables (sauf pour moi, les trucs improbables, j'y pense toujours
) avec une manette de la fameuse console nintendi Wiiiiiii dont le nom lui meme devrait t'obliger a essayerle petit gyroscope place dans la manette est facilement "hackable", tu trouves le code sur le net pour chopper les infos de la puce via le wifi sur sa position, y'a plus qu'a pondre la boucle de contre reaction qui utilisera les donnees de la manette pour corriger automatiquement la position
et a toi les dessins d'ar contemporain pour la mise au point
pour ton idée de dessiner a la verticale, tu viens d'inventer le plotter en coordonnées pseudo polaires en fait
decidement, j'aime bien ce sujet, il y a de l'ingéniosité partout

junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() Wyldix Ven 10 Juin 2016 - 22:00
Wyldix Ven 10 Juin 2016 - 22:00
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: G4st0n, bras robotisé
![]() Smalldave Ven 10 Juin 2016 - 22:19
Smalldave Ven 10 Juin 2016 - 22:19
Ainsi il reste juste à calculer l'angle alpha en fonction de la distance , par contre avec ce principe tu ne change pas de hauteur facilement.Smalldave a écrit:J'ai fait quelques petits calculs pour faire varier le deuxième angle en fonction du premier afin que la tête reste sur un plan horizontal si cela peut aider :

Bon courage pour trouver la solution qui te convienne, en tout cas le projet est motivant.
Smalldave- petit nouveau

- Messages : 17
Points : 21
Date d'inscription : 01/11/2015
Age : 48
Localisation : aisne
Re: G4st0n, bras robotisé
![]() dh42 Ven 10 Juin 2016 - 23:06
dh42 Ven 10 Juin 2016 - 23:06
Le truc çà va être de définir plein de points intermédiaires. Çà risque de ralentir pas mal le processus.
C'est justement ce dont je te parlais plus haut, au lieu de faire faire les calculs d'interpolation (les pt intermédiaires) par l'arduino, il faut les faire faire par le PC qui produira le Gcode, autrement dit, une fois un Gcode standard 3 axes créé par CB, il faut relire ce Gcode avec un second programme lancé par le post traitement de CB (un traitement du Gcode lui même, lancé automatiquement APRES que le Gcode ai été créé) pour générer les pt d'interpolation et créer un nouveau fichier texte contenant tout ces points .. ensuite l'arduino n'a qu'à lire les points du fichier texte au lieu de les calculer lui même.
- Plus de confort de développement (Visual studio est quand même plus évolué que l'interface de programmation de l'arduino)
- tous les calculs complexes sont fait à l'avance par le PC donc pas besoin de puissance de calcul énorme sur l'arduino.
- seules les droites nécessiterons de faire des calculs d'interpolation, pour les arcs, CB peut le faire à ta place, ce n'est qu'une question de réglage de la conversion Arc -> segments du PP
++
David
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin

- Messages : 25654
Points : 38363
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Sam 11 Juin 2016 - 10:23
F6FCO Sam 11 Juin 2016 - 10:23
Oui c'est la meilleure solution de décharger l'arduino au maximum. Une bonne occasion d'apprendre le Python.
junkdealer a écrit:
le petit gyroscope place dans la manette est facilement "hackable", tu trouves le code sur le net pour chopper les infos de la puce via le wifi sur sa position, y'a plus qu'a pondre la boucle de contre reaction qui utilisera les donnees de la manette pour corriger automatiquement la position
Jamais eu de wiii, mais j'ai un MPU5060 qui traine dans mes tiroirs acheté justement au cas ou j'aurais un truc improbable à faire. J'avais l'idée d'un seegway pour mon lapin nain.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Sam 11 Juin 2016 - 13:53
junkdealer Sam 11 Juin 2016 - 13:53
++++ avec David, ne donner que des coordonnees a bouffer a l'arduino est de loin la meilleure solution, quelle que soit la maniere de les calculer
sinon pour la wii, tu trouves des manettes neuves pour quelques dizaines d'euro, et des occases sur la bay ou autre pour trois fois rien
et pour te mettre l'eau a la bouche :
http://hacknmod.com/hack/top-30-wiimote-hacks-of-the-web/
tu pourrais par exemple piloter ton bras avec la manette, pour dessiner "main levée"
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() F6FCO Sam 11 Juin 2016 - 16:46
F6FCO Sam 11 Juin 2016 - 16:46
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Sam 11 Juin 2016 - 17:04
junkdealer Sam 11 Juin 2016 - 17:04
F6FCO a écrit:Pour le coup çà ne serait plus de la robotique mais de la télécommande
ah ben non, c'est juste une autre maniere de donner a manger a tes moteurs via l'arduino, ça reste de la robotique
idee : telecommande via manette wii et dremel au bout du bras du robot, et hop, sculpture 2.0 en HNC, humanoid numerical control
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() dh42 Sam 11 Juin 2016 - 17:13
dh42 Sam 11 Juin 2016 - 17:13
Après tu nous fait un accouplement de gustave et du bras pour faire une grosse version de ça.
(coupez le son, ça tue les oreilles !!)
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25654
Points : 38363
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() L'Ankou Dim 12 Juin 2016 - 10:42
L'Ankou Dim 12 Juin 2016 - 10:42
F6FCO a écrit:Garde précieusement tes Legos techniques, les souvenirs d'enfance çà n'a pas de prix
Bon, C'est Bilou(te) et Ricoud qui gagnent le pompon, l'idée est lumineuse et j'adopte.
La courroie est suffisamment longue pour être croisée sans problème, c'est la solution la plus simple à mettre en oeuvre. J'avoue que çà m'aurait bien amusé d'usiner des pignons à 90° à la CN mais je garde l'idée pour plus tard si la courroie croisée ne donne pas satisfaction.

J'ai tout lu depuis le début (sisi), et un truc auquel il semble que personne n'ai pensé (je donne mon avis pour G3rm1, le cousin de G4st0n
), pourquoi ne pas avoir mis la courroie autour du support, et le moteur fixe sur le bras tournant? comme ça le moteur tourne avec le reste, plus compact, et il n'y a plus de limitation d'angle de rotation...Sinon sacré taf!! et la pelleteuse me donne des idées
Bye!

L'Ankou- complétement accro
- Messages : 3435
Points : 3588
Date d'inscription : 22/04/2015
Age : 40
Localisation : 56130 FEREL
Re: G4st0n, bras robotisé
![]() F6FCO Dim 12 Juin 2016 - 19:09
F6FCO Dim 12 Juin 2016 - 19:09
@David, je rage de ne pas avoir eu l'idée de l'héxapode avant lui
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() L'Ankou Dim 12 Juin 2016 - 20:03
L'Ankou Dim 12 Juin 2016 - 20:03
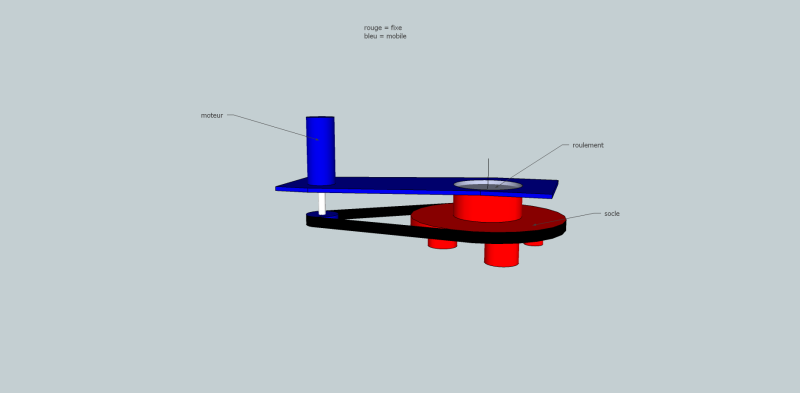
C'est plus clair?
En rouge partie fixe, en bleu partie mobile...
Sinon, pour s'affranchir des roues... :
L'Ankou- complétement accro
- Messages : 3435
Points : 3588
Date d'inscription : 22/04/2015
Age : 40
Localisation : 56130 FEREL
Re: G4st0n, bras robotisé
![]() dh42 Dim 12 Juin 2016 - 20:15
dh42 Dim 12 Juin 2016 - 20:15
Je me demande ce qu'il y a dans les pieds qui nécessite un câblage électrique

Par contre je suis sidéré par le fait d'avoir autant de précision avec de simples servo-moteurs pour les mouvements. J'avais fais quelques essais avec ce genre de composants et je n'avais pas été super emballé.
Un produit de meilleur qualité ? ... une démultiplication interne + importante ? ... ou l'encodeur lui même ?
Un arduino peut gérer un truc aussi compliqué ? .. il y a une chiée de moteurs sur ce truc ? ... et je ne parle pas des calculs de positionnement ou pour le faire marcher
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25654
Points : 38363
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() junkdealer Dim 12 Juin 2016 - 22:23
junkdealer Dim 12 Juin 2016 - 22:23
pour les fils sur le pied, peut etre betement un capteur qui indique que le pid touche le sol ? piezo, on a en plus une idee de la pression sur le pied
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() dh42 Dim 12 Juin 2016 - 23:06
dh42 Dim 12 Juin 2016 - 23:06
pour les fils sur le pied, peut etre betement un capteur qui indique que le pid touche le sol ? piezo, on a en plus une idee de la pression sur le pied
Ah oui, effectivement, ça pourrait être ça.
Ensuite quand je maîtriserai bien le concept je pourrai toujours migrer vers un Rasperry qui doit être plus rapide je pense mais comme je ne connais pas l'animal ni ne sait coder en serpent il y aura un gros temps de latence.
Ce qui me fait penser qu'Andy, dans un de ses derniers mail, m'a dit qu'il arrivait à faire tourner la version Linux de Cambam sur un Rasperry Pi ..
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25654
Points : 38363
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Lun 13 Juin 2016 - 11:53
F6FCO Lun 13 Juin 2016 - 11:53
@ David, Junk, je ne crois pas que ce soit un arduino, un peu léger pour un truc pareil ou alors pour le nombre de pattes à gérer un 2560 au minimul mais je penserai plutôt pour un Rasperry ou un autre dans le genre.
Fantastique ce truc-là.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() junkdealer Lun 13 Juin 2016 - 12:01
junkdealer Lun 13 Juin 2016 - 12:01
L'Ankou a écrit:
C'est plus clair?
En rouge partie fixe, en bleu partie mobile...
tout con, mais fallait y penser
junkdealer- complétement accro
- Messages : 3658
Points : 4239
Date d'inscription : 04/03/2015
Age : 54
Localisation : Nancy
Re: G4st0n, bras robotisé
![]() L'Ankou Lun 13 Juin 2016 - 13:07
L'Ankou Lun 13 Juin 2016 - 13:07
A pluche! Je retourne penser à mon tour à bois...
L'Ankou- complétement accro
- Messages : 3435
Points : 3588
Date d'inscription : 22/04/2015
Age : 40
Localisation : 56130 FEREL
Re: G4st0n, bras robotisé
![]() F6FCO Mar 14 Juin 2016 - 16:37
F6FCO Mar 14 Juin 2016 - 16:37
Bon, une mauvaise nouvelle
pour cette version du bras robot c'est cuit ! Les moteurs ont pris trop de jeu. Quand j'ai fais les essais avec le moteur monté sur la planchette (voir plus haut dans le sujet) il n'y avait aucun jeu et les arrêts étaient très précis, ce qui m'a fait valider le projet d'ailleurs.
Mais à force d'essais les démultiplications des deux moteurs du bras ont pris beaucoup de jeu, celui de la rotation va encore mais il n'a pas encore beaucoup travaillé. Çà fait trois jours que je fais des essais dessus parce que le bras ne tenait pas une position fixe, je me suis pris le chou à chercher l'erreur dans le code, refais entièrement le programme deux fois, pour finalement m'apercevoir que c'est la démultiplication moteur qui à vieilli. Çà parait évident comme çà sur les vidéos mais quand on a le nez juste dessus on ne le remarque pas de prime abord, je mettais plutôt en cause mon travail (en en perdant mon latin). Après quelques recherches sur le net ces petits moteurs (d'occasion sur Ebay) servaient dans des caisses enregistreuses de supermarché, je leur en ai surement trop demandé avec G4st0n
On va encore mettre en commun nos cerveaux pour trouver la parade
Sur cette vidéo on voit bien le jeu, le maintien en position est analysé par le mouvement du papillon du coupleur opto, au début du projet il n'y avait aucun jeu:
Et l'effet que çà fait en bout de bras, jeu multiplié par le bras de levier et la démult 1/1.5, donc plus du tout jouable pour faire du dessin:
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() L'Ankou Mar 14 Juin 2016 - 17:05
L'Ankou Mar 14 Juin 2016 - 17:05
Là tout de suite j'ai pas d'idées, désolé... ou alors avec des vérins pneumatiques... Mon frangin avait travaillé avec des vérins fait avec du tube souple, qui, en gonflant, faisait se rétracter la tresse qui l 'entourait, mais e ne trouve pas d'images...
A pluche...
L'Ankou- complétement accro
- Messages : 3435
Points : 3588
Date d'inscription : 22/04/2015
Age : 40
Localisation : 56130 FEREL
Page 13 sur 15 • 1 ... 8 ... 12, 13, 14, 15

 Sujets similaires
Sujets similaires» support bras articulé
» modifications sur scie radiale à bras
» Fixation bras motorisé sur portail
» bras articulé lampe de chevet