






G4st0n, bras robotisé
Page 6 sur 15 •  1 ... 5, 6, 7 ... 10 ... 15
1 ... 5, 6, 7 ... 10 ... 15 

 Re: G4st0n, bras robotisé
Re: G4st0n, bras robotisé
![]() bob47 Ven 19 Fév 2016 - 14:57
bob47 Ven 19 Fév 2016 - 14:57
Joli circuit
Est pour la gravure? la CNC?
BOB
bob47- complétement accro

- Messages : 2565
Date d'inscription : 28/10/2011

Re: G4st0n, bras robotisé
![]() athanase Ven 19 Fév 2016 - 16:28
athanase Ven 19 Fév 2016 - 16:28
J'allais poser la même question !
Donc si j'ai bien compris le programme est dans l'arduino qui commande cette platine (les 3 esclaves), c'est bien ça ?

athanase- complétement accro
- Messages : 648
Points : 1160
Date d'inscription : 10/01/2014
Age : 54
Localisation : Tarn
Re: G4st0n, bras robotisé
![]() F6FCO Ven 19 Fév 2016 - 21:24
F6FCO Ven 19 Fév 2016 - 21:24
L'explication de tout çà: il y aura un maître qui commandera tout, un arduino qui sera certainement remplacé plus tard par un rasperry PI. Ce maître décidera de ce que fera le robot et commandera trois autres arduinos esclaves asservissant chacun un moteur (trois moteurs cc sur le bras).
Ce schéma et son PCB est celui des trois arduinos esclaves montés sur la même plaque pour réduire au maximum la filasse toujours source de désagréments.
Il y a deux programmes un pour le maître qui reste évolutif suivant ce qu'on voudra faire faire au bras, pour le moment il est basique, et un programme esclave, le même pour les trois esclaves, seule leur id changeant pour que le maître puisse les différencier.
A noter que les drivers L298 sont très sensibles à leur alimentation, si on branche le 12v avant le 5v le L298 crâme, j'ai monté un relais sur la carte qui ne commutera le 12v seulement si le 5v est présent. Pas d'erreur possible de cette façon, je ne compte plus les L298 que j'ai fumé par distraction, surtout sur breadboard, on vite fait de débrancher un fil par mégarde
 . Heureusement qu'ils ne sont pas chers chez le chinois.
. Heureusement qu'ils ne sont pas chers chez le chinois.Je reposte le PCB, j'ai rajouté quelques commentaires:


F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -

Re: G4st0n, bras robotisé
![]() F6FCO Sam 20 Fév 2016 - 8:57
F6FCO Sam 20 Fév 2016 - 8:57
Reste plus qu'à remonter la CNC béton pour graver le pcb, mais avant il va falloir que je guérisse de la grosse crève qui m'habite depuis une semaine, pas question d'aller dans l'atelier dans cet état.
Prise de POM, quelques prises d'angles à partir de l'interface série de l'arduino maître et nouvelle POM pour finir.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() Wyldix Sam 20 Fév 2016 - 9:28
Wyldix Sam 20 Fév 2016 - 9:28
Très joli PCB! Mais est-ce que tu n'aurais pas avantage à n'avoir qu'un seul bouton reset?
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: G4st0n, bras robotisé
![]() F6FCO Sam 20 Fév 2016 - 9:51
F6FCO Sam 20 Fév 2016 - 9:51
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() Wyldix Sam 20 Fév 2016 - 10:10
Wyldix Sam 20 Fév 2016 - 10:10
Un dernier détail, normalement lors du routage, on essaie d'avoir les transitoires de courant qui proviennent directement des condensateurs de découplage. Donc dans ton cas, le condensateur de 100 nF du 12V (avant le régulateur) devrait se trouver entre l'entrée du régulateur et l'arrivé du 12V et non en bout de piste (comme sur ton schéma). Dans ton cas ça ne vas pas changer grand chose mais sur des circuits numériques rapides, il peut y avoir des surprises. J'aurais aussi ajouter un condensateur de forte capacité pour stabiliser le 12V.
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: G4st0n, bras robotisé
![]() F6FCO Sam 20 Fév 2016 - 12:32
F6FCO Sam 20 Fév 2016 - 12:32
J'ai finalement perdu deux poussoirs, deux capas, deux résistances et gagné deux straps supplémentaires. Ton discours sur les obstacles éventuels à fait ressortir une question que je n'ai toujours pas réglée: la prise de POM. En dehors de la POM manuelle (action humaine volontaire par poussoir) il y en aura une automatique au démarrage et à chaque reset.
La question est:
- POM avec bras complètement fermé ?
- POM avec bras complètement ouvert ?
Si j'arrive à le faire dessiner un jour, les dessins seront inversés l'un par rapport à l'autre et je n'arrive pas prendre une décision. On va prendre l'exemple comme si G4ston était humain et voudrait nous dessiner/montrer un croquis, on est en face de lui et c'est peut-être mieux d'avoir le haut de la feuille à l'intérieur et le dessin bien placé par rapport au spectateur éventuel. D'un autre coté il ne fera peut-être pas que dessiner...
L'aventure de l'axe parfait n'est pas terminée
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Lun 22 Fév 2016 - 0:45
F6FCO Lun 22 Fév 2016 - 0:45
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Mar 23 Fév 2016 - 14:12
F6FCO Mar 23 Fév 2016 - 14:12
Petite explication de ce qui s'y passe:
- Prise de POM avec le poussoir du haut
- Prise de POP avec les deux poussoirs du bas
- Validation de la POP (led)
- Ordres d'angles passés au clavier de l'arduino maître relié en I2C: 45°, 0°, 90°, 0°, 180°, 0°, 255°. A 0° le doigt revient bien en position de POP.
- Prise de POM et Validation.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Dim 13 Mar 2016 - 20:44
F6FCO Dim 13 Mar 2016 - 20:44
Bon je voulais mettre un image de mon travail mais je n'y arrive pas avec la nouvelle boite de dialogue.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() meles Dim 13 Mar 2016 - 20:51
meles Dim 13 Mar 2016 - 20:51
F6FCO a écrit:Bon je voulais mettre un image de mon travail mais je n'y arrive pas avec la nouvelle boite de dialogue.
Essayes en faisant un glisser déposer !

meles- Admin

- Messages : 14932
Points : 21889
Date d'inscription : 13/05/2011
Localisation : Aubagne
Re: G4st0n, bras robotisé
![]() dh42 Dim 13 Mar 2016 - 22:10
dh42 Dim 13 Mar 2016 - 22:10
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() KOKO 57 Dim 13 Mar 2016 - 22:44
KOKO 57 Dim 13 Mar 2016 - 22:44

KOKO 57- complétement accro
- Messages : 9868
Points : 10805
Date d'inscription : 05/05/2015
Age : 58
Localisation : Moselle (57)
Re: G4st0n, bras robotisé
![]() dh42 Dim 13 Mar 2016 - 22:58
dh42 Dim 13 Mar 2016 - 22:58
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: G4st0n, bras robotisé
![]() F6FCO Dim 13 Mar 2016 - 23:01
F6FCO Dim 13 Mar 2016 - 23:01

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Mer 16 Mar 2016 - 15:26
F6FCO Mer 16 Mar 2016 - 15:26
Dernière édition par F6FCO le Mer 16 Mar 2016 - 15:30, édité 1 fois
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() bilou(te) Mer 16 Mar 2016 - 15:29
bilou(te) Mer 16 Mar 2016 - 15:29
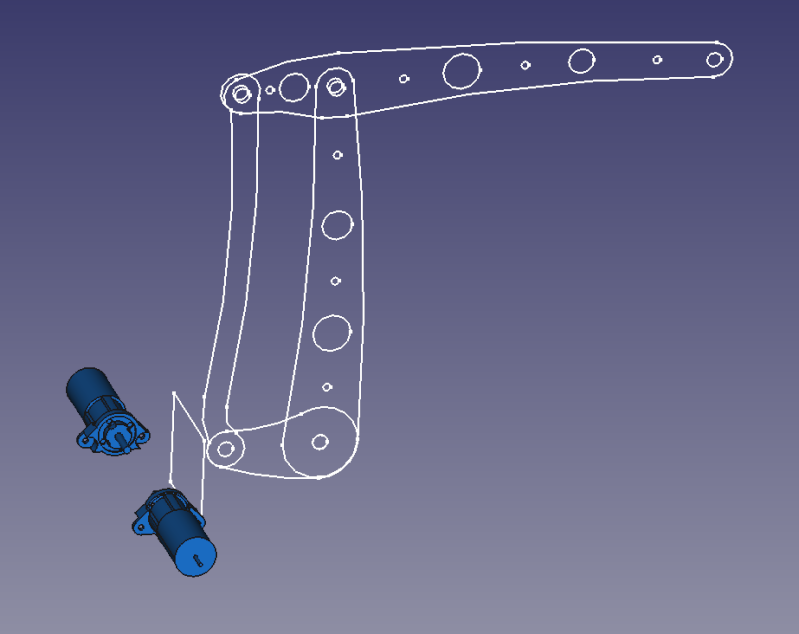
C'est une toute autre façon, certes, mais quand j'ai vu le dessin passer rapidement pendant le chargement de la page, j'ai cru que c'était du paint pour le brasF6FCO a écrit:Je progresse lentement, je cogite plus sur l'apprentissage de Freecad que sur mon projet. C'est une toute autre façon d'appréhender la 3D que Sketchup.
La vue freecad juste au-dessus est pas si mal que ça, pourquoi tu dis que tu galères ?
bilou(te)- complétement accro
- Messages : 1804
Points : 3079
Date d'inscription : 28/08/2013
Age : 40
Localisation : Gironde, dans la banlieue bordelaise
Re: G4st0n, bras robotisé
![]() F6FCO Mer 16 Mar 2016 - 15:36
F6FCO Mer 16 Mar 2016 - 15:36
Sur l'image j'ai réussi à les positionner tous les deux ou je voulais mais c'est un peu par coup de pot.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Ven 18 Mar 2016 - 0:03
F6FCO Ven 18 Mar 2016 - 0:03

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() F6FCO Dim 20 Mar 2016 - 20:28
F6FCO Dim 20 Mar 2016 - 20:28


F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() meles Dim 20 Mar 2016 - 20:33
meles Dim 20 Mar 2016 - 20:33
meles- Admin
- Messages : 14932
Points : 21889
Date d'inscription : 13/05/2011
Localisation : Aubagne
Re: G4st0n, bras robotisé
![]() F6FCO Dim 20 Mar 2016 - 23:30
F6FCO Dim 20 Mar 2016 - 23:30
En ce moment je suis vraiment emm..dé par la répétition circulaire, çà me met les clones en rosé et je n'arrive pas à les valider.
Pareil pour le CTRL Z qui se comporte un peu de manière anarchique.
Je regrette un peu Sketchup avec ses inférences bien pratiques pour positionner les objets.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() meles Lun 21 Mar 2016 - 7:43
meles Lun 21 Mar 2016 - 7:43
Pour les inferences, il y a bien un "snap to grid" dans les préférences de sketcehr mais pas très pratique en fait.
@+
meles- Admin
- Messages : 14932
Points : 21889
Date d'inscription : 13/05/2011
Localisation : Aubagne
Re: G4st0n, bras robotisé
![]() F6FCO Lun 21 Mar 2016 - 13:14
F6FCO Lun 21 Mar 2016 - 13:14
Mon pbm de rep circulaire, mieux vaut un dessin qu'un longue explication:
Je voudrais créer trois pieds sous ma base tournante, j'en modélise un et j'essaie de le dupliquer à 120°.

Si je valide sur OK, les deux rosés disparaissent il ne reste que l'original.
Message: "2 des formes transformées n'inersectent pas avec le support. Transformation réussie."
J'ai bien un Polarpattern qui se crée dans l'arborescence avec 3 occurences mais rien à l'écran.
On dirait qu'on ne peut pas créer des répétitions d'objet s'il ne fait pas déjà partie d'un autre objet, là le pied original est bien isolé.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: G4st0n, bras robotisé
![]() meles Lun 21 Mar 2016 - 19:11
meles Lun 21 Mar 2016 - 19:11
F6FCO a écrit:On dirait qu'on ne peut pas créer des répétitions d'objet s'il ne fait pas déjà partie d'un autre objet, là le pied original est bien isolé.
Si, on peut mais pas avec cet outil!
Va jeter un oeil là: http://www.freecadweb.org/wiki/index.php?title=Draft_Array
Si tu coinces, j'essaierai de faire une vidéo
@+
meles- Admin
- Messages : 14932
Points : 21889
Date d'inscription : 13/05/2011
Localisation : Aubagne
Page 6 sur 15 • 1 ... 5, 6, 7 ... 10 ... 15

 Sujets similaires
Sujets similaires» support bras articulé
» Kity 439, un bras réglable en hauteur
» modifications sur scie radiale à bras
» Fixation bras motorisé sur portail