






Ma DIY-MK3-CR10-XXL (ellogo67)
+9
Tircown
nono30
Hervé-34
silky
jcl
junkdealer
Djam
momoclic
ellogo67
13 participants
Page 3 sur 3
Page 3 sur 3 •  1, 2, 3
1, 2, 3

 Re: Ma DIY-MK3-CR10-XXL (ellogo67)
Re: Ma DIY-MK3-CR10-XXL (ellogo67)
![]() Djam Mer 29 Aoû 2018 - 18:51
Djam Mer 29 Aoû 2018 - 18:51
Si tu as peur de l'étirement de la courroie part sur des plus large oui mais aussi des courroie"blindé" avec des fils métal dans la courroie, contrairement au courroie chinoise bon marché qui n'ont que du tissu moulé dans la courroie...
Djam- très actif

- Messages : 366
Date d'inscription : 03/04/2018

Re: Ma DIY-MK3-CR10-XXL (ellogo67)
![]() Tircown Mer 29 Aoû 2018 - 19:13
Tircown Mer 29 Aoû 2018 - 19:13
En revanche avec des courroies blindées métalique (les blanches par exemple) il faut prévoir des poulies un peu plus grosse, un rayon trop faible peut casser l'armature au bout d'un certain temps. Il existe des courroies blindées au kevlar qui sont une bonne alternative.
Tircown- je prends du galon

- Messages : 91
Points : 93
Date d'inscription : 27/03/2018
Age : 36
Localisation : Alsace
Re: Ma DIY-MK3-CR10-XXL (ellogo67)
![]() ellogo67 Mer 29 Aoû 2018 - 23:05
ellogo67 Mer 29 Aoû 2018 - 23:05
J'ai fait une recherche, je suppose que vous parlez de ce type de courroies :

Généralement, on utilise des roues crantées de 20 dents, il suffit que je prenne des 32 dents par exemples pour augmenter le diamètre de la roue;
et par conséquent, d'une pierre deux coups, je vais augmenter la précision du déplacement de l'axe.
En revanche, je n'ai pas réussi à avoir une courroies renforcée de plus de 6 mm !

ellogo67- acharné du forum

- Messages : 471
Points : 674
Date d'inscription : 14/04/2012
Age : 61
Localisation : Alsace
Re: Ma DIY-MK3-CR10-XXL (ellogo67)
![]() dh42 Jeu 30 Aoû 2018 - 0:23
dh42 Jeu 30 Aoû 2018 - 0:23
Salut,
Non, c'est le contraire, poulie + grosse = déplacement plus important par tour moteur, donc résolution plus faible mais vitesse plus élevée pour une même v de rotation du moteur. (et pour produire un même effort de traction au niveau de la courroie, il faut aussi plus de couple moteur vu que la distance axe moteur/courroie augmente)
ex: poulie 32 dents pas de 2 = 32*2 > 64mm linéaire par tour moteur.
résolution max d'un PàP en 1/2 pas ou plus : 400 pas/tour(*), donc résolution avec poulie 32 au pas de 2 = 64/400 = 0.16mm
pour une v de déplacement de 150mm/s, soit 150*60 = 9000 mm/min avec un développement de 64mm, V de rotation du moteur = 140 tr/min
(*) comme dit plus haut, ça ne sert à rien de piloter en 256 micropas ça n'améliorera pas la résolution, dans tous les cas un PàP ne peut s’arrêter que sur des pas entiers et des 1/2 pas, donc tu sera tj limité à 400 positions/tours ... les µ-pas élevés, ça sert juste à lisser la rotation ...
en pratique, avec une résolution de 0.16, ça signifie que tu ne pourra faire que des cotes multiples de 0.16
par exemple, une cote de 10mm aura soit 9.92 (62*0.16) soit 10.08 (63*0.16), mais tu ne pourra pas avoir la cote de 10
avec des poulies de 20 dents au pas de 2, tu aurais un développement de 40mm, soit 40/400 = 0.1mm de résolution, c'est mieux, et surtout c'est plus utilisable car les cotes multiples de 0.1 sont plus courantes que des cotes multiples de 0.16.
si tu cherche une résolution élevée, il faut réduire le développement (nb de dent*pas) et faire tourner le moteur plus vite pour compenser la perte de vitesse.
Edit:
et cette notion de résolution est également très importante pour le choix du pas en Z (pas de la vis si VàB ou trap, ou pas courroie*nb de dents) car dans ce cas, non seulement tu à les mêmes limitations de cotes possibles en fonction de la résolution, mais il faut aussi que cette résolution soit un multiple des épaisseurs de couches "standards" (0.05, 0.1, 0.2 ...)
par exemple, avec une VàB au pas de 5mm sur Z, tu aurais une résolution maxi en Z de 5/400 = 0.0125, donc pas de pb pour faire des couches de 0.05 ou même 0.025 si c'est possible en impression (je ne sais pas si on peut descendre aussi bas)
++
David
il suffit que je prenne des 32 dents par exemples pour augmenter le diamètre de la roue; et par conséquent, d'une pierre deux coups, je vais augmenter la précision du déplacement de l'axe.
Non, c'est le contraire, poulie + grosse = déplacement plus important par tour moteur, donc résolution plus faible mais vitesse plus élevée pour une même v de rotation du moteur. (et pour produire un même effort de traction au niveau de la courroie, il faut aussi plus de couple moteur vu que la distance axe moteur/courroie augmente)
ex: poulie 32 dents pas de 2 = 32*2 > 64mm linéaire par tour moteur.
résolution max d'un PàP en 1/2 pas ou plus : 400 pas/tour(*), donc résolution avec poulie 32 au pas de 2 = 64/400 = 0.16mm
pour une v de déplacement de 150mm/s, soit 150*60 = 9000 mm/min avec un développement de 64mm, V de rotation du moteur = 140 tr/min
(*) comme dit plus haut, ça ne sert à rien de piloter en 256 micropas ça n'améliorera pas la résolution, dans tous les cas un PàP ne peut s’arrêter que sur des pas entiers et des 1/2 pas, donc tu sera tj limité à 400 positions/tours ... les µ-pas élevés, ça sert juste à lisser la rotation ...
en pratique, avec une résolution de 0.16, ça signifie que tu ne pourra faire que des cotes multiples de 0.16
par exemple, une cote de 10mm aura soit 9.92 (62*0.16) soit 10.08 (63*0.16), mais tu ne pourra pas avoir la cote de 10
avec des poulies de 20 dents au pas de 2, tu aurais un développement de 40mm, soit 40/400 = 0.1mm de résolution, c'est mieux, et surtout c'est plus utilisable car les cotes multiples de 0.1 sont plus courantes que des cotes multiples de 0.16.
si tu cherche une résolution élevée, il faut réduire le développement (nb de dent*pas) et faire tourner le moteur plus vite pour compenser la perte de vitesse.
Edit:
et cette notion de résolution est également très importante pour le choix du pas en Z (pas de la vis si VàB ou trap, ou pas courroie*nb de dents) car dans ce cas, non seulement tu à les mêmes limitations de cotes possibles en fonction de la résolution, mais il faut aussi que cette résolution soit un multiple des épaisseurs de couches "standards" (0.05, 0.1, 0.2 ...)
par exemple, avec une VàB au pas de 5mm sur Z, tu aurais une résolution maxi en Z de 5/400 = 0.0125, donc pas de pb pour faire des couches de 0.05 ou même 0.025 si c'est possible en impression (je ne sais pas si on peut descendre aussi bas)
++
David
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin

- Messages : 25655
Points : 38364
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -

Re: Ma DIY-MK3-CR10-XXL (ellogo67)
![]() ellogo67 Mer 19 Sep 2018 - 23:42
ellogo67 Mer 19 Sep 2018 - 23:42
Bonsoir 
Petit à petit l'oiseau fait son nid.
Plusieurs achats :

Un système double fils avec une seule buse.
On verra ce que ça donne.

Pour faciliter le système double fils, je vais utiliser du tube téflon avec diamètre intérieur très inférieur à ce qui se fait normalement, pour améliorer le bowden.
Un plaque souple chauffante alimentée en 220 V.
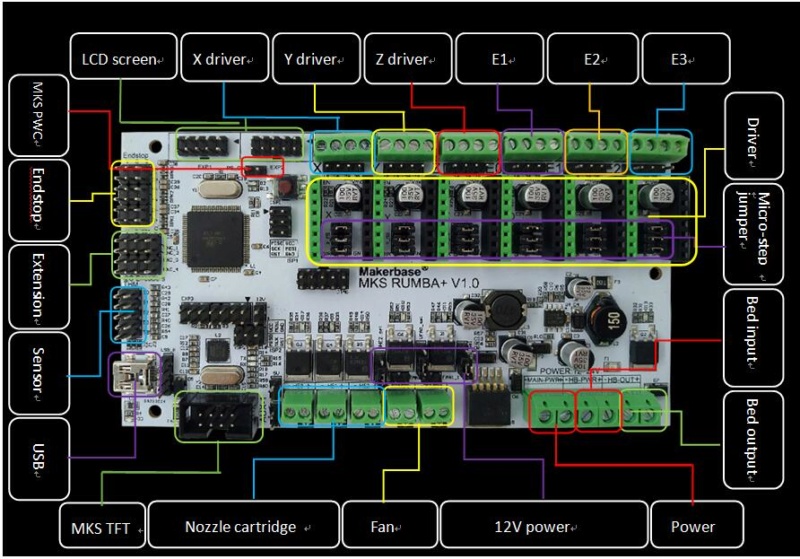
J'ai finalement choisi une Makerbase MKS Rumba+ V1.0.

Un BlTouch nouvelle génération (avec tige en plastique)

Des drivers TMC2130 V1.1.

Vis ressorts pour le lit ou bed.

Plaque type BuildTak pour l’adhérence des impressions.
Vous ne pouvez pas savoircomme j'en ai ch.er comme je me suis embêté à trouver ces plaques en 400x400 mm. C'est fou !!! 
J'ai encore plein d'achats à effectuer encore, ne serait-ce que les profilés ...
Petit à petit l'oiseau fait son nid.
Plusieurs achats :

Un système double fils avec une seule buse.
On verra ce que ça donne.

Pour faciliter le système double fils, je vais utiliser du tube téflon avec diamètre intérieur très inférieur à ce qui se fait normalement, pour améliorer le bowden.

Un plaque souple chauffante alimentée en 220 V.

J'ai finalement choisi une Makerbase MKS Rumba+ V1.0.

Un BlTouch nouvelle génération (avec tige en plastique)

Des drivers TMC2130 V1.1.

Vis ressorts pour le lit ou bed.

Plaque type BuildTak pour l’adhérence des impressions.
Vous ne pouvez pas savoir
J'ai encore plein d'achats à effectuer encore, ne serait-ce que les profilés ...
ellogo67- acharné du forum
- Messages : 471
Points : 674
Date d'inscription : 14/04/2012
Age : 61
Localisation : Alsace
Page 3 sur 3 • 1, 2, 3

 Sujets similaires
Sujets similaires» Probleme cr10
» Profil CR10 slic3r
» CR10 et Prusa sclicer
» Atelier d'Ellogo67
» Mes réalisations (Ellogo67).
» Profil CR10 slic3r
» CR10 et Prusa sclicer
» Atelier d'Ellogo67
» Mes réalisations (Ellogo67).
Page 3 sur 3
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum