






Piloter deux Pap avec LinuxCnc (suite)
4 participants
métabricoleur :: FAO, Pilotage Machine CNc, Gcode, réalisations en CNC :: Autres logiciels de pilotage
Page 1 sur 1

 Piloter deux Pap avec LinuxCnc (suite)
Piloter deux Pap avec LinuxCnc (suite)
![]() Alain37 Mer 9 Oct 2019 - 18:05
Alain37 Mer 9 Oct 2019 - 18:05
Bonjour ,
Sur un axe (Y) j'ai deux Pap à piloter :
Il me faut un driver par moteur , ça c'est OK
Les commandes "step/dir" sont en parallèle , ça c'est compris
Mais dans "stepconf" comment peut-on les programmer ?
Merci par avance
Alain
Sur un axe (Y) j'ai deux Pap à piloter :
Il me faut un driver par moteur , ça c'est OK
Les commandes "step/dir" sont en parallèle , ça c'est compris
Mais dans "stepconf" comment peut-on les programmer ?
Merci par avance
Alain
Dernière édition par Alain37 le Lun 14 Oct 2019 - 23:44, édité 1 fois

Alain37- posteur Régulier

- Messages : 135
Points : 164
Date d'inscription : 12/12/2011
Age : 77
Localisation : Canton de Chateau Renault

Re: Piloter deux Pap avec LinuxCnc (suite)
![]() dh42 Mer 9 Oct 2019 - 21:58
dh42 Mer 9 Oct 2019 - 21:58
Salut,
Je ne suis pas du tout Linuxien, mais il y a pas mal d'infos ici sur les réglages de base.
http://linuxcnc.org/docs/2.4/html/config_stepconf_fr.html
++
David
Je ne suis pas du tout Linuxien, mais il y a pas mal d'infos ici sur les réglages de base.
http://linuxcnc.org/docs/2.4/html/config_stepconf_fr.html
++
David
Dernière édition par dh42 le Mer 9 Oct 2019 - 22:05, édité 1 fois
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin

- Messages : 25653
Points : 38362
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -

Re: Piloter deux Pap avec LinuxCnc (suite)
![]() dh42 Mer 9 Oct 2019 - 22:02
dh42 Mer 9 Oct 2019 - 22:02
Re
J'avais mal lu ; en fait tu a 2 moteurs sur le même axe ?
Il faut un drivers par moteur, mais par contre tu peux utiliser une même sortie (axe) de ta BoB pour piloter les 2 drivers, et dans ce cas, si c'est comme sur Mach3, il n'y a rien à configurer de particulier, le soft ne "sait pas" qu'il y a 2 moteurs, pour lui il n'y a qu'une seule sortie Y. Il faudra bien sûr que tes drivers soient réglées de la même manière (mode µpas, Intensité maxi) et que tu fasse ton câblage de façon à ce qu'ils tournent dans le bon sens car ça ne pourra pas être inversé dans le soft en utilisant une seule sortie d'axe.
Si par contre tu veux utiliser 1 sortie d'axe par moteur, par exemple pour faire l'équerrage automatique (axe A esclave de Y), alors effectivement il faut faire des réglages dans le soft ... et la je ne peux pas trop t'en dire plus à propos de LinuxCNC
Peut être des infos ici
https://www.usinages.com/threads/gestions-de-deux-servomoteur-sur-portique-linuxcnc.102870/
++
David
J'avais mal lu ; en fait tu a 2 moteurs sur le même axe ?
Il faut un drivers par moteur, mais par contre tu peux utiliser une même sortie (axe) de ta BoB pour piloter les 2 drivers, et dans ce cas, si c'est comme sur Mach3, il n'y a rien à configurer de particulier, le soft ne "sait pas" qu'il y a 2 moteurs, pour lui il n'y a qu'une seule sortie Y. Il faudra bien sûr que tes drivers soient réglées de la même manière (mode µpas, Intensité maxi) et que tu fasse ton câblage de façon à ce qu'ils tournent dans le bon sens car ça ne pourra pas être inversé dans le soft en utilisant une seule sortie d'axe.
Si par contre tu veux utiliser 1 sortie d'axe par moteur, par exemple pour faire l'équerrage automatique (axe A esclave de Y), alors effectivement il faut faire des réglages dans le soft ... et la je ne peux pas trop t'en dire plus à propos de LinuxCNC
Peut être des infos ici
https://www.usinages.com/threads/gestions-de-deux-servomoteur-sur-portique-linuxcnc.102870/
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25653
Points : 38362
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() Alain37 Jeu 10 Oct 2019 - 19:50
Alain37 Jeu 10 Oct 2019 - 19:50
Bonsoir,
Merci dh42,
j'ai peut-être trouvé une solution, mais je souhaiterais savoir si quelqu'un l'a déjà
utilisée :
Pour info les moteurs ont chacun un driver, un moteur câblé dans un sens et le deuxième inversé
Il y a aussi la solution, on passe à autre chose, et tout cela est remplacé par un moteur double axe !!
A+
Merci dh42,
j'ai peut-être trouvé une solution, mais je souhaiterais savoir si quelqu'un l'a déjà
utilisée :

Pour info les moteurs ont chacun un driver, un moteur câblé dans un sens et le deuxième inversé
Il y a aussi la solution, on passe à autre chose, et tout cela est remplacé par un moteur double axe !!
A+
Alain37- posteur Régulier
- Messages : 135
Points : 164
Date d'inscription : 12/12/2011
Age : 77
Localisation : Canton de Chateau Renault
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() dh42 Ven 11 Oct 2019 - 0:26
dh42 Ven 11 Oct 2019 - 0:26
Re
A mon avis, le plus simple c'est de câbler ta seule sortie Y (step et dir) sur les 2 drivers, comme ça rien à changer dans LinuxCNC.
Il est très large ton portique ? ; il y a des risques qu'il perde l'équerrage facilement ? ; tu a des photos de la machine ?
++
David
A mon avis, le plus simple c'est de câbler ta seule sortie Y (step et dir) sur les 2 drivers, comme ça rien à changer dans LinuxCNC.
Il est très large ton portique ? ; il y a des risques qu'il perde l'équerrage facilement ? ; tu a des photos de la machine ?
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25653
Points : 38362
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() Alain37 Lun 14 Oct 2019 - 23:50
Alain37 Lun 14 Oct 2019 - 23:50
Bonsoir,
En fait on viens de constater que la carte BOB est HS
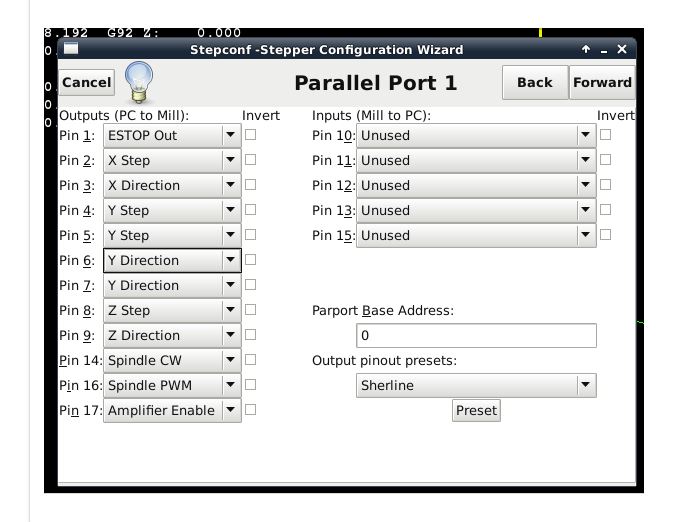
Donc changement de carte et branchement comme sur l'image "stepconf"
La largeur de la CNC est de 800mm longueur 1000mm
à suivre ....
Alain
En fait on viens de constater que la carte BOB est HS
Donc changement de carte et branchement comme sur l'image "stepconf"
La largeur de la CNC est de 800mm longueur 1000mm
à suivre ....
Alain
Alain37- posteur Régulier
- Messages : 135
Points : 164
Date d'inscription : 12/12/2011
Age : 77
Localisation : Canton de Chateau Renault
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() dh42 Mar 15 Oct 2019 - 0:24
dh42 Mar 15 Oct 2019 - 0:24
Salut,
Pas de bol
Ok, 800 de large, c'est pas gigantesque ; si tes guidages sont bien rigides, tu peux probablement te passer du double référencement et donc n'utiliser qu'une seule sortie pour piloter les 2 drivers ..
++
David
Pas de bol
Ok, 800 de large, c'est pas gigantesque ; si tes guidages sont bien rigides, tu peux probablement te passer du double référencement et donc n'utiliser qu'une seule sortie pour piloter les 2 drivers ..
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25653
Points : 38362
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() F6FCO Mar 15 Oct 2019 - 15:01
F6FCO Mar 15 Oct 2019 - 15:01
Bonjour,
Je dirai comme David, tes deux drivers branchés sur l'axe Y, réglés exactement de la même façon et ton réglage dans Stepconf semble être bon. Mais pourquoi 2 moteurs sur le même axe ?
Je dirai comme David, tes deux drivers branchés sur l'axe Y, réglés exactement de la même façon et ton réglage dans Stepconf semble être bon. Mais pourquoi 2 moteurs sur le même axe ?

F6FCO- complétement accro

- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() Alain37 Mar 15 Oct 2019 - 18:26
Alain37 Mar 15 Oct 2019 - 18:26
Bonsoir,
Pourquoi deux moteurs sur Y , mon collègue est parti d'un modèle de machine
Personnellement je n'aurais pas fait comme ça ....
Un moteur un axe traversant ...
ou un moteur axe double et une tige de commande de chaque côté ....
il arrive que quand on a une idée dans la tête ....
Mais , sur le plan technique c'est intéressant à résoudre
Alain
Pourquoi deux moteurs sur Y , mon collègue est parti d'un modèle de machine
Personnellement je n'aurais pas fait comme ça ....
Un moteur un axe traversant ...
ou un moteur axe double et une tige de commande de chaque côté ....
il arrive que quand on a une idée dans la tête ....
Mais , sur le plan technique c'est intéressant à résoudre
Alain
Alain37- posteur Régulier
- Messages : 135
Points : 164
Date d'inscription : 12/12/2011
Age : 77
Localisation : Canton de Chateau Renault
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() speedjf37 Mar 15 Oct 2019 - 21:00
speedjf37 Mar 15 Oct 2019 - 21:00
Bonjour Alain,
https://forum.linuxcnc.org/16-stepconf-wizard/30264-2-y-axis-steppers-and-linuxcnc
http://linuxcnc.org/docs/2.7/html/man/man9/gantry.9.html
https://forum.linuxcnc.org/forum/47-hal-examples/30818-gantry-hal-example
Cordialement JF
https://forum.linuxcnc.org/16-stepconf-wizard/30264-2-y-axis-steppers-and-linuxcnc
http://linuxcnc.org/docs/2.7/html/man/man9/gantry.9.html
https://forum.linuxcnc.org/forum/47-hal-examples/30818-gantry-hal-example
Cordialement JF

speedjf37- je prends du galon

- Messages : 99
Points : 108
Date d'inscription : 03/03/2015
Age : 67
Localisation : TOURS
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() Alain37 Mar 15 Oct 2019 - 22:53
Alain37 Mar 15 Oct 2019 - 22:53
Bonsoir JF,
Vu tes liens , c'est de là que viens la photo du post
Mais long à lire (faut passer par la traduction)
Alain
Vu tes liens , c'est de là que viens la photo du post
Mais long à lire (faut passer par la traduction)
Alain
Alain37- posteur Régulier
- Messages : 135
Points : 164
Date d'inscription : 12/12/2011
Age : 77
Localisation : Canton de Chateau Renault
Re: Piloter deux Pap avec LinuxCnc (suite)
![]() speedjf37 Mar 15 Oct 2019 - 23:36
speedjf37 Mar 15 Oct 2019 - 23:36
re
https://forum.linuxcnc.org/47-hal-examples/34072-master-branch-gantry-example
dans l'exemple :
dommage pour le my_LinuxCNC_machine-rod.hal que ce soit avec une carte Mesa et des servos avec PID à transformer pour des Pas à Pas et bob //
Si je comprends un peu , il y a un composant "KINS" qui fait le lien "KINEMATICS" entre les axes (3) XYZ et les JOINTS (4) et le homing se fait sur les "JOINTS"
dans le my_LinuxCNC_machine-rod.ini
extrait !!!!!!!
[KINS]
JOINTS = 4
KINEMATICS = trivkins coordinates=YYXZ
#********************
# Joint 0 - Y
[JOINT_0]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 20.0
MIN_FERROR = 1.0
MAX_VELOCITY = 300
MAX_ACCELERATION = 1500
**********************************
**********************************
HOME_OFFSET = 43
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_FINAL_VEL = 50
HOME_USE_INDEX = NO
HOME_SEQUENCE = -1
# Joint 1 - Y1
[JOINT_1]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 20.0
MIN_FERROR = 1.0
MAX_VELOCITY = 300
MAX_ACCELERATION = 1500
HOME_OFFSET = 45
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_FINAL_VEL = 50
HOME_USE_INDEX = NO
HOME_SEQUENCE = -1
# Axis Y
#********************
[AXIS_Y]
MAX_VELOCITY = 360
MAX_ACCELERATION = 1500
MIN_LIMIT = -0.01
MAX_LIMIT = 1260.1
#********************
JF qui aurait bien testé le truc s'il pouvait !!!
https://forum.linuxcnc.org/47-hal-examples/34072-master-branch-gantry-example
dans l'exemple :
dommage pour le my_LinuxCNC_machine-rod.hal que ce soit avec une carte Mesa et des servos avec PID à transformer pour des Pas à Pas et bob //
Si je comprends un peu , il y a un composant "KINS" qui fait le lien "KINEMATICS" entre les axes (3) XYZ et les JOINTS (4) et le homing se fait sur les "JOINTS"
dans le my_LinuxCNC_machine-rod.ini
extrait !!!!!!!
[KINS]
JOINTS = 4
KINEMATICS = trivkins coordinates=YYXZ
#********************
# Joint 0 - Y
[JOINT_0]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 20.0
MIN_FERROR = 1.0
MAX_VELOCITY = 300
MAX_ACCELERATION = 1500
**********************************
**********************************
HOME_OFFSET = 43
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_FINAL_VEL = 50
HOME_USE_INDEX = NO
HOME_SEQUENCE = -1
# Joint 1 - Y1
[JOINT_1]
#********************
TYPE = LINEAR
HOME = 0.0
FERROR = 20.0
MIN_FERROR = 1.0
MAX_VELOCITY = 300
MAX_ACCELERATION = 1500
HOME_OFFSET = 45
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_FINAL_VEL = 50
HOME_USE_INDEX = NO
HOME_SEQUENCE = -1
# Axis Y
#********************
[AXIS_Y]
MAX_VELOCITY = 360
MAX_ACCELERATION = 1500
MIN_LIMIT = -0.01
MAX_LIMIT = 1260.1
#********************
JF qui aurait bien testé le truc s'il pouvait !!!
speedjf37- je prends du galon
- Messages : 99
Points : 108
Date d'inscription : 03/03/2015
Age : 67
Localisation : TOURS

 Sujets similaires
Sujets similaires» Vevor Laser Co2 80W
» Comment piloter un moteur tri avec un relais
» Impossible de piloter la vitesse de ma broche avec Mach3
» Fabrication de deux Cajons ( prononcer Carone )Suite et fin
» recherche scripts pour formes obloniques droits et en cercle
» Comment piloter un moteur tri avec un relais
» Impossible de piloter la vitesse de ma broche avec Mach3
» Fabrication de deux Cajons ( prononcer Carone )Suite et fin
» recherche scripts pour formes obloniques droits et en cercle
métabricoleur :: FAO, Pilotage Machine CNc, Gcode, réalisations en CNC :: Autres logiciels de pilotage
Page 1 sur 1
Permission de ce forum:
Vous ne pouvez pas répondre aux sujets dans ce forum