






Gust4v3, robot d'entrainement au C
Page 2 sur 2 •  1, 2
1, 2

 Re: Gust4v3, robot d'entrainement au C
Re: Gust4v3, robot d'entrainement au C
![]() dh42 Mer 17 Juin 2015 - 22:44
dh42 Mer 17 Juin 2015 - 22:44
Va falloir lui prendre un billet pour le prochain voyage vers Mars
Gus est maintenant capable de détecter les obstacles tout en roulant
C'est quoi exactement les "yeux" ? des webcam ?
++
David
dh42- Admin

- Messages : 25653
Date d'inscription : 21/06/2009 -


Re: Gust4v3, robot d'entrainement au C
![]() KOKO 57 Mer 17 Juin 2015 - 22:48
KOKO 57 Mer 17 Juin 2015 - 22:48

KOKO 57- complétement accro

- Messages : 9867
Points : 10804
Date d'inscription : 05/05/2015
Age : 58
Localisation : Moselle (57)
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Jeu 18 Juin 2015 - 0:05
F6FCO Jeu 18 Juin 2015 - 0:05
Non David, c'est un module ultrasons, tu as un émetteur et un récepteur (les deux cylindres). L'émetteur envoie un train de créneaux qui sont réfléchis par l'obstacle, le temps que le train met pour revenir au récepteur est calculé pour donner la distance. C'est le principe du radar.
Je suis en train de batailler avec ce bidule monté sur le servo. Je le fais balayer en semi circulaire et je voudrais que le programme me renvoie l'angle de la position de l'obstacle par rapport à l'axe du robot. Mais pas évident à faire car le bidule chinois n'est pas vraiment précis et même avec robot et obstacle fixe je n'obtiens jamais la même valeur.
Le but final serait:
- le robot rencontre un obstacle.
- Il s'arrete puis recule un peu.
- Il balaye l'espace autour de lui pour détecter un espace libre sans obstacle.
- Il fait les manœuvres pour repartir dans la direction de l'espace libre.

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() dh42 Jeu 18 Juin 2015 - 16:35
dh42 Jeu 18 Juin 2015 - 16:35
Ok, je me disais bien que de la reconnaissance de forme et d'obstacle via traitement d'image serait peut être un peu trop lourde à gérer par un arduino
Sur mon aspi robot, il y a des capteurs IR répartis sur 180° à l'avant, ce qui lui permet de "choisir" une direction libre d'obstacle (et même de ralentir pour approcher l'obstacle au plus prêt avant contact, car il y a un détecteur de contact en plus)
++
David
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin
- Messages : 25653
Points : 38362
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Jeu 18 Juin 2015 - 23:26
F6FCO Jeu 18 Juin 2015 - 23:26
Je viens de rajouter un module PIR sur Gust4v3, pour la détection d'être vivants.
Poursuite de chats en vue
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() bob47 Ven 19 Juin 2015 - 0:23
bob47 Ven 19 Juin 2015 - 0:23
Il faut un permit de conduire pour sa ?

BOB47

bob47- complétement accro
- Messages : 2565
Points : 3345
Date d'inscription : 28/10/2011
Age : 67
Localisation : THONON
Re: Gust4v3, robot d'entrainement au C
![]() icarePetibles Ven 19 Juin 2015 - 9:13
icarePetibles Ven 19 Juin 2015 - 9:13
Les cartes Arduino (hors Due) sont incapables de traiter les images.
@+

icarePetibles- acharné du forum

- Messages : 414
Points : 762
Date d'inscription : 14/05/2015
Age : 70
Localisation : Moselle
Re: Gust4v3, robot d'entrainement au C
![]() bilou(te) Ven 19 Juin 2015 - 9:42
bilou(te) Ven 19 Juin 2015 - 9:42
Pour tes systèmes "radar", sur un radar, il ne s'agit pas d'un calcul de temps entre l'aller et le retour d'un signal (pas possible si ton signal est un créneau régulier), mais d'une différence de fréquence entre le signal émis et le signal reçu (effet Doppler) :
tu envoies avec une fréquence f et ça revient avec une fréquence F plus importante. Ca ne dit pas la distance à la voiture. Par contre, ça donne sa vitesse.
J'avais fait l'étude en prépa, c'est assez simple à comprendre, si ça intéresse du monde, je ferai une démo
Mais, en gros, on envoie une onde dont le créneau à une longueur (ou durée) t. Il ne s'agit ps de la longueur d'onde l, il y a en général un rapport alpha (entre 0 et 1) entre t et l (t=alpha*l, aux unités près)
Le début arrive à un instant T, la fin du créneau arrive à un instant T+t1 (t1
Au niveau du récepteur, le signal revient à un instant T' pour le début, et T'+2t1 pour la fin. La différence entre t1 et t donne donc la vitesse.
Dans ton cas, si le robot a une vitesse constante et va droit vers l'obstacle, il y aura une différence de fréquence entre le signal émis et le signal reçu, mais elle ne sera pas fonction de la distance à l'obstacle.
Du coup, je ne vois pas trop le principe... Différence d'intensité du signal (plus ça réfléchit loin, plus tu perds d'intensité, a priori en cube de la distance si ton signal part dans toutes les directions) ?
Ne te reste plus qu'à mettre une serpillière dessous, et à toi le carrelage propre.
Ou alors, tu transformes ça en cireuse à parquet

bilou(te)- complétement accro
- Messages : 1804
Points : 3079
Date d'inscription : 28/08/2013
Age : 40
Localisation : Gironde, dans la banlieue bordelaise
Re: Gust4v3, robot d'entrainement au C
![]() Wyldix Ven 19 Juin 2015 - 11:09
Wyldix Ven 19 Juin 2015 - 11:09
Pour le radar, il me semble qu'en mesurant le déphasage entre le signal émis et reçu, on peut déterminer la distance. Mais je peux aussi me tromper.
Les ultrasons sont très précis mais ils émettent avec un angle de 30 à 45° donc si tu veux "cartographier" plus précisément, le lidar peux être une solution. c'était très cher à l'époque mais ça commence à se démocratiser. Quelques liens:
Avec tourelle (donc scan sur 180° ou plus): http://www.xevel.fr/blog/index.php?tag/lidar
http://www.seeedstudio.com/depot/RPLIDAR-360-degree-Laser-Scanner-Development-Kit-p-1823.html?cPath=14
Sans tourelle (donc un seul point, mais on peut toujours ajouter un servo pour la rotation
Bonnes expérimentations!
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Ven 19 Juin 2015 - 11:16
F6FCO Ven 19 Juin 2015 - 11:16
bob47 a écrit:
Il faut un permit de conduire pour sa ?
BOB47
Pour l'instant je dirais plutôt un permis de construire
Salut Biloute, dans notre cas il semblerait que c'est bien une mesure de temps sur le retour d'un train de créneaux à fréquence fixe de 40Khz
https://itechnofrance.wordpress.com/2013/03/12/utilisation-du-module-ultrason-hc-sr04-avec-larduino/
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() stanloc Ven 19 Juin 2015 - 13:26
stanloc Ven 19 Juin 2015 - 13:26
Les télémètres à US ont été abondamment diffusés dès les premiers appareils photo polaroïd c'est à dire il y a 40-45 ans environ, je pense. Bon les chauves-souris ont été équipées encore plus tôt.
Stan
stanloc- Banni
- Messages : 536
Points : 916
Date d'inscription : 12/10/2014
Age : 79
Re: Gust4v3, robot d'entrainement au C
![]() bilou(te) Ven 19 Juin 2015 - 13:49
bilou(te) Ven 19 Juin 2015 - 13:49
Je suis d'accord sur la notion de déphasage, mais je ne comprends pas comment fonctionne une mesure de déphasage sur un signal périodique :
Comment savoir si l'onde qui revient est la dernière envoyée ou celle d'avant ? on part du principe que vue la fréquence, c'est la dernière émise qui revient ? ça me paraît un peu simpliste (et franchement imprécis).
Stanloc, je suis tou à fait d'accord avec toi, c'est également ce que j'avais écrit sur le radar pour la vitesse, une différence de fréquence entre l'aller et le retour, mais du coup, pour une mesure de distance, ça se passe comment ?
bilou(te)- complétement accro
- Messages : 1804
Points : 3079
Date d'inscription : 28/08/2013
Age : 40
Localisation : Gironde, dans la banlieue bordelaise
Re: Gust4v3, robot d'entrainement au C
![]() Wyldix Ven 19 Juin 2015 - 15:17
Wyldix Ven 19 Juin 2015 - 15:17
J'imagine que ça ne fonctionne que pour les "petites" distances pour rester sur une demi-période (~ c/2f), après il est possible de réaliser une variation de la fréquence linéaire pour déterminer sur des grandes distances. Maintenant on utilise la mesure du temps de vol comme l'a expliqué stanloc. On arrive à mesurer des temps de l'ordre de la picoseconde (10^-12) donc la précision est de l'ordre du millimètre. La lumière va vite mais finalement elle ne parcourt qu' 1 mm en 3 ps (et en plus on doit mesurer l'allée-retour). C'est l'avantage d'utiliser le son, la vitesse du son est très lente et les temps de vol sont mesurables avec un simple microcontrôleur donc c'est encore plus facile.
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: Gust4v3, robot d'entrainement au C
![]() bilou(te) Ven 19 Juin 2015 - 15:42
bilou(te) Ven 19 Juin 2015 - 15:42
Wyldix a écrit:Re,
J'imagine que ça ne fonctionne que pour les "petites" distances pour rester sur une demi-période (~ c/2f), après il est possible de réaliser une variation de la fréquence linéaire pour déterminer sur des grandes distances. Maintenant on utilise la mesure du temps de vol comme l'a expliqué stanloc. On arrive à mesurer des temps de l'ordre de la picoseconde (10^-12) donc la précision est de l'ordre du millimètre. La lumière va vite mais finalement elle ne parcourt qu' 1 mm en 3 ps (et en plus on doit mesurer l'allée-retour). C'est l'avantage d'utiliser le son, la vitesse du son est très lente et les temps de vol sont mesurables avec un simple microcontrôleur donc c'est encore plus facile.
Je connais très bien le principe, c'est la notion en gras qui me semble compliquée.
J'étais plutôt branché mécanique et physique ondulatoire qu'électromagnétisme, bien que ce soit lié, et la physique ondulatoire ne me pose pas de problème (une grande phrase d'un copain : je ne comprends ps qu'un dipôle oscillant puisse être aussi rapide
Si tu prends une période variable, OK. Mais là, c'est ma connaissance de l'outil qui me bloquait, plus que la physique
Si je reviens à ce que tu dis, en gros, si on prend un ultrason de base (mettons 30kHz ou 30000s-1) et une célérité de 300m/s, on se retrouve à mesurer, avec ta formule c/2f, une distance de 300/30000/2 soit 0.005m soit 5mm...
bilou(te)- complétement accro
- Messages : 1804
Points : 3079
Date d'inscription : 28/08/2013
Age : 40
Localisation : Gironde, dans la banlieue bordelaise
Re: Gust4v3, robot d'entrainement au C
![]() Wyldix Ven 19 Juin 2015 - 16:11
Wyldix Ven 19 Juin 2015 - 16:11
Wyldix- complétement accro
- Messages : 721
Points : 1615
Date d'inscription : 27/02/2012
Age : 29
Localisation : Fribourg/CH
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Sam 20 Juin 2015 - 0:55
F6FCO Sam 20 Juin 2015 - 0:55
Gust4v3 apprend tranquillement, il est maintenant capable d'avancer plein pot, de s’arrêter quand il détecte un obstacle à moins de 20cm, reculer, explorer l'espace, tourner à droite en vitesse réduite pour se dégager et repartir plein pot. Et tout çà sur banc
Mais çà a aussi son charme, ce n'est pas encore Chappie mais y'a un peu de çà
C'est ce qui me fait rêver grand gamin que je suis
Reste encore pas mal de trucs à lui apprendre, comme détecter la voie libre et choisir de tourner dans le bon sens pour s'échapper.
Je lui ai rajouté un module PIR, pas implémenté encore pour l'instant.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Lun 22 Juin 2015 - 9:17
F6FCO Lun 22 Juin 2015 - 9:17
Je lui ai trouvé de belles roues de roller dans une grande surface de sport bien connue pour remplacer les moches roues en CP. Il a juste fallu lui refaire des moyeux adaptés dans du rond alu de 15.



Je viens aussi de recevoir les embouts de câblage en grappe et je lui ai optimisé la filasse.

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Mer 24 Juin 2015 - 15:10
F6FCO Mer 24 Juin 2015 - 15:10
Faute de mieux je travaille maintenant sur la programmation du capteur PIR. Il sera commandé par le deuxième arduino qui communiquera avec l'arduino maitre par une liaison I²C. Aux premiers essais je me suis rendu compte que le PIR à un angle de détection bien trop large pour mon application, je lui ai fabriqué un museau et çà a réduit un peu l'angle.
Le but serait que s'il détecte une présence vivante il se déroute pour lui foncer dessus.
Aux dernières nouvelles Gust4v3 serait un chien.

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() Strib Mer 24 Juin 2015 - 15:14
Strib Mer 24 Juin 2015 - 15:14
Faut être très polyvalent pour arriver à ça...
j'admire aussi le museau fabrication maison (de ton cru !
Stéphane

Strib- complétement accro
- Messages : 2473
Points : 4676
Date d'inscription : 25/04/2012
Age : 52
Localisation : Corse du Sud -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Mer 24 Juin 2015 - 15:57
F6FCO Mer 24 Juin 2015 - 15:57
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() Rémi(de la Montagne Noire Mer 24 Juin 2015 - 21:40
Rémi(de la Montagne Noire Mer 24 Juin 2015 - 21:40
Rémi(de la Montagne Noire- complétement accro
- Messages : 1747
Points : 3460
Date d'inscription : 28/04/2012
Age : 69
Localisation : Aude
Re: Gust4v3, robot d'entrainement au C
![]() Guilhèlmus Jeu 25 Juin 2015 - 10:03
Guilhèlmus Jeu 25 Juin 2015 - 10:03
En effet, Rémi, ils sont fous ces romains !
@+ Pégui

Guilhèlmus- complétement accro
- Messages : 3334
Points : 5981
Date d'inscription : 25/10/2013
Age : 45
Localisation : 13oqp
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Jeu 25 Juin 2015 - 18:09
F6FCO Jeu 25 Juin 2015 - 18:09
Rémi(de la Montagne Noire a écrit:Naaan...!? Est-ce PQ air?
Naaan...! un rouleau technique de Sop4l1n. Juste le bon diamètre.
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Sam 4 Juil 2015 - 14:06
F6FCO Sam 4 Juil 2015 - 14:06

Au départ j'ai voulu l'alimenter seulement avec l'accus chinois 5v qui ne donne que du 4,14v (même après une nuit de charge). Gus ne voulait pas bouger, seul les arduinos et le servo fonctionnaient.
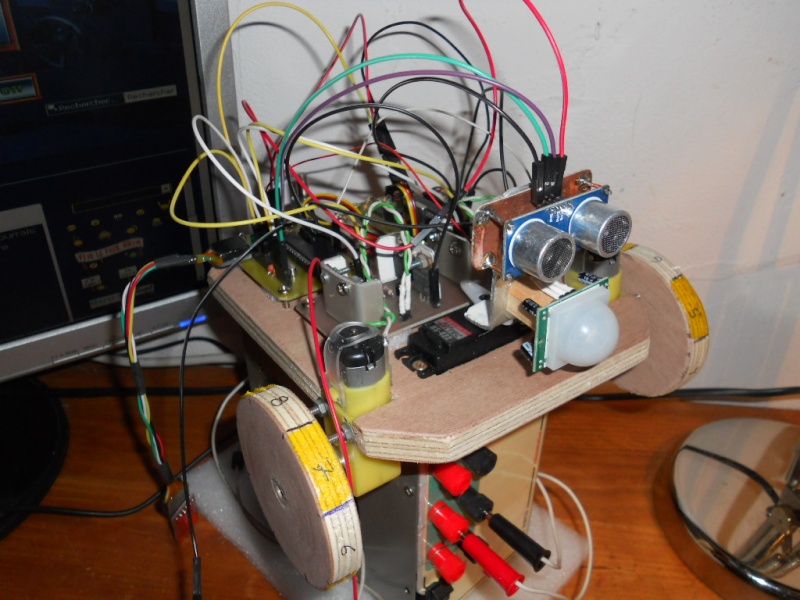
Ensuite j'ai rajouté mon accus 12v pour alimenter les deux moteurs avec un 7805 pour ramener à 5v. Gus frissonnait mais ne faisait pas mine d'avancer, mais quand je le soulevais de terre il fonctionnait correctement. Je l'ai un peu suralimenté et j'ai changé le 7805 pour un 7808, çà donne çà:
Bon, on voit qu'il est un peu foufou... il y a un proverbe qui dit que les chiens ne font pas des chats...
Globalement il semble fonctionner comme le veut sa programmation mais avec quelques défauts à améliorer:
- moteurs trop rapides, je vais changer le 7808 pour un 7806.
- Il arrive un peu trop vite sur les obstacles à cause de la vitesse et ne peut pas toujours s’arrêter à temps.
- le moteur droit semble être plus rapide que le gauche, je verrais çà plus tard quand Gus sera un peu plus tranquille, çà peut s'arranger par le code.
- Il ne voit rien derrière lui, normal je n'avais pas prévu. Rajouter un bumper.
- Il semble analyser des obstacles un peu trop souvent, je vais voir çà de près.
- La marche arrière après détection d'obstacle dure trop longtemps, à réduire à 500ms.
- Le module PIR à servi de bumper avant et il pend lamentablement.
- Il avait un comportement un peu erratique, je me suis aperçu après coup que les batteries trainaient par terre parce qu'un élastique de maintien avait lâché.
- La roue folle à l'arrière touche les accus quand elle passe en marche arrière.
L'état actuel de Gust4ve avec son PIR explosé, j'imagine si un de mes chats avait trainé dans le coin...

F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Re: Gust4v3, robot d'entrainement au C
![]() F6FCO Ven 10 Juin 2016 - 18:16
F6FCO Ven 10 Juin 2016 - 18:16
Ben si justement, le regretté Gust4v3 n'est plus, il caracolait sur le carrelage heureux comme un petit robot sans soucis quand il a rencontré ma minette Waza qui revenait un peu énervée de sa journée de chasse. Lui avait envie d'un câlin, elle non. Bref affrontement à l'issue certaine et Gus était tout à recâblerF6FCO a écrit:
L'état actuel de Gust4ve avec son PIR explosé, j'imagine si un de mes chats avait trainé dans le coin...
, un peu découragé sur le coup j'avais laissé l'ouvrage sur le métier et quand j'ai voulu m'y remettre hier çà a été pour m'apercevoir que l'accus chinois à rendu l'âme.Je garde la base sous le coude gauche et je le remonterai peut-être dans le futur
F6FCO- complétement accro
- Messages : 4645
Points : 6901
Date d'inscription : 13/05/2011
Age : 99
Localisation : Aveyron de l'Ouest, Hi Haaaa ! -
Page 2 sur 2 • 1, 2