






Les motorisations

 Les motorisations
Les motorisations
![]() novice bois Lun 22 Jan 2018 - 22:12
novice bois Lun 22 Jan 2018 - 22:12
un passionné aura peut-être la réponse à ma question:
quelles sont les différences entre les motorisations suivantes: connaissez-vous leurs avantages et leurs inconvénients:
- pas à pas
- Hybrides
- Brushless AC
- Asynchrones
les sorotec PFE, ne fonctionnent qu'en pas à pas ?
merci

novice bois- posteur Régulier

- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois

Re: Les motorisations
![]() momoclic Mar 23 Jan 2018 - 10:07
momoclic Mar 23 Jan 2018 - 10:07
Pas évident d'expliquer tout ça succinctement et simplement !
Le moteur asynchrone, le plus courant sur les machines plus ou moins puissantes est un moteur dit à cage d'écureuil à cause de la forme de son rotor :
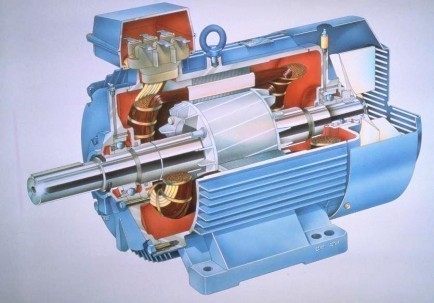 Moteur asynchrone à cage d'écureuil
Moteur asynchrone à cage d'écureuilGénéralement c'est un moteur triphasé. Son mode de fonctionnement est très simple c'est le décalage de 120° entre les phases qui crée un champ magnétique tournant qui entraine le rotor. Une simple inversion de deux phases permet de changer son sens de rotation.
Sa vitesse est fonction de la fréquence du courant d'alimentation et du nombre de paire de pôle qui constitue son bobinage.
Ce moteur est dit asynchrone parce que cette vitesse fluctue en fonction de la charge et du glissement magnétique.
Simple à entretenir, puisque qu'aucune pièce en frottement.
Les trois autres sont à la base des moteurs synchrones.
Ce type de machine s'il ressemble beaucoup au moteur asynchrone se caractérise par l'usage d'aimants permanents ou d'électro-aimants.
Il est dit synchrone parce que sa vitesse, déterminé aussi en fonction de la fréquence et du nombre de paire de pôle, est constante donc synchronisé à la fréquence du courant. Un moteur synchrone, non assisté, n'a pas de couple au démarrage.
Autre caractéristique importante d'une machine synchrone c'est qu'elle peut fonctionner en alternateur. Ainsi l'alternateur de ta voiture peut fonctionner comme moteur, tout comme la dite "dynamo"de vélo ...
Brushless : Anglicisme qui veut dire "sans balais". Pas de charbon comme dans un moteur (dit universel) de perceuse portative par exemple. Un moteur "Brushless" en français se dit "synchrone".
AC = Acronyme anglais "Alternating Current" qui signifie "courant alternatif".
DC = Acronyme anglais "Direct Current" qui signifie "courant continu".
 Moteur synchrone, on voit les aimants permanents de type néodyme
Moteur synchrone, on voit les aimants permanents de type néodymeLe moteur pas-à-pas dit moteur à réluctance variable, possède plus d'enroulements (bobines) que les moteurs précédents. En faisant varier fréquence, tension et intensité (varier la réluctance) dans ses bobines on peut moduler vitesse et angle de rotation. Ce rôle est dévolu au pilote électronique, indissociable du moteur, le "driver". Selon les paramètres envoyés par le contrôleur de la machine outil, le driver ajuste fréquence, tension et intensité pour répondre à la demande.
Un moteur pas-à-pas capable de 400 pas au tour est en mesure de parcourir des déplacements d'angles, appelés aussi pas, de 1,8°. Cependant le driver est aussi capable de l'inciter à se déplacer de fractions de pas ... Dans ces cas là la précision est moins grande. Autre chose importante et utile sur les machines-outils, un moteur pas-à-pas délivre son couple maximal sous tension à l'arrêt, plus sa vitesse augmente, plus le couple diminue.
Notez que grâce à cette électronique on alimente ces moteurs à courant alternatifs avec du courant continu.
 Petit moteur pas-à-pas
Petit moteur pas-à-pasLe moteur pas-à-pas hybride est une variante du moteur pas-à-pas classique. C'est par l'ajout d'un aimant permanent entre les deux demi-rotors et en les décalant angulairement d'un demi pas qu'on réduit le nombre de bobine tout en assouplissant le fonctionnement général. Ainsi on augmente aussi le nombre de pas. Aujourd'hui beaucoup de moteur pas-à-pas sont des hybrides.
 Décalage angulaire d'un rotor de moteur pas-à-pas hybride
Décalage angulaire d'un rotor de moteur pas-à-pas hybrideSurtout n'ouvrez jamais un moteur pas-à-pas au remontage il aura perdu entre 1/2 et 2/3 de sa puissance ...
Dernière édition par momoclic le Mar 23 Jan 2018 - 12:23, édité 12 fois
momoclic- complétement accro

- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() momoclic Mar 23 Jan 2018 - 11:25
momoclic Mar 23 Jan 2018 - 11:25
Si tout n'est pas clair ou si vous relevez des erreurs, merci de me les indiquer je corrigerais.
momoclic- complétement accro
- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() novice bois Mar 23 Jan 2018 - 20:56
novice bois Mar 23 Jan 2018 - 20:56
Dernière édition par novice bois le Mer 24 Jan 2018 - 11:56, édité 1 fois
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() bricoleux Mer 24 Jan 2018 - 0:38
bricoleux Mer 24 Jan 2018 - 0:38
merci aussi,
c'est très bien exposé, très intéressant !
une question :
"Surtout n'ouvrez jamais un moteur pas-à-pas au remontage il aura perdu entre 1/2 et 2/3 de sa puissance ..."
pourquoi ?
++

bricoleux- complétement accro
- Messages : 3700
Points : 7449
Date d'inscription : 25/03/2012
Age : 74
Localisation : belgique
Re: Les motorisations
![]() dh42 Mer 24 Jan 2018 - 1:51
dh42 Mer 24 Jan 2018 - 1:51
les sorotec PFE, ne fonctionnent qu'en pas à pas ?
Non, sur les BZT PFE et même les SRT, tu peux choisir le type de moteurs (options)
Pas à pas simple: le montage standard et le moins cher, ça correspond au prix catalogue des PFE de chez BZT
Pas à pas "closed loop": le moteur dispose en plus d'un encodeur qui retourne une info de position au driver (spécifique) et permet de détecter et de corriger une éventuelle perte de pas.
https://www.sorotec.de/shop/CNC-Controls/Closed-loop-Systeme/
Servo moteurs, DC ou AC: ceux la ont obligatoirement un encodeur, ils permettent des V de rotation plus élevées que les PàP (3000 tr au lieu de 1000) et ont un couple à peut près constant, de plus contrairement aux moteur PàP qui ne peuvent s’arrêter que sur des pas ou des demi-pas (donc au maxi 400 position d'arrêt par tour moteur en demi-pas soit une résolution de 0.9°), les servos peuvent s’arrêter sur n'importe quelle position, leur résolution dépend de celle de l'encodeur, qui peut avoir plusieurs milliers de pas, et donc de position d'arrêt par tour. (2500 sur le moteur du lien)
https://www.sorotec.de/shop/Hybrid-Servo-Motor-20-Nm-6989.html
Note que chacun des 4 types de moteurs (PàP, PàP "closed loop", Servo AC et Servo DC) nécessitent des drivers spécifiques.
++
David
_________________
Traduction Française de CamBam et de sa documentation.

dh42- Admin

- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -

Re: Les motorisations
![]() novice bois Mer 24 Jan 2018 - 12:00
novice bois Mer 24 Jan 2018 - 12:00
quel est la différence entre le servo moteur 200W/36volt et 400W/60volt ?
sur une PFE 1000 PX, je peux mettre lequel et sur quel axe ?
les 2 sont des Leadshine ?
Concernant le Servodriver Leadshine ACS806, il en faut un par axe X,Y,Z ?
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() dh42 Mer 24 Jan 2018 - 13:50
dh42 Mer 24 Jan 2018 - 13:50
il y en a simplement un 2x plus puissant (et plus coupleux) que l'autre (pour seulement 10€ de différence), par contre je serais bien incapable de te dire ce qu'il faut sur une PFE ... enfin si, un gros carnet de chèque, car ça augmente fortement la facture par rapport à des PàP (dans les 1000€ de plus je pense pour les 3 axes, les drivers étant plus cher aussi)
Pour ce genre de choses, il faut demander directement à Sorotec, eux ils pourront te dire ce qui se monte ou pas ... et surtout à quel tarif, car je pense que vue la V de rotation d'un servo il faut une démultiplication par courroie en plus pour les utiliser dans la meilleur plage et gagner du couple, donc d'autres accessoires à payer. (les PàP sont montés en prise directe sur les PFE, idem pour les "closed loop")
en gros, ça fait dans les 400€ par axe en servo 1.27Nm + driver au lieu d'environ 140€ par axe en PàP 3Nm + driver (montage de série)
les 2 sont des Leadshine ?
Concernant le Servodriver Leadshine ACS806, il en faut un par axe X,Y,Z ?
oui au 2 questions.
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Les motorisations
![]() momoclic Mer 24 Jan 2018 - 14:46
momoclic Mer 24 Jan 2018 - 14:46
bricoleux a écrit:salut,
une question :
"Surtout n'ouvrez jamais un moteur pas-à-pas au remontage il aura perdu entre 1/2 et 2/3 de sa puissance ..."
pourquoi ?
Merci,
Pour ça je n'ai jamais eu d'explications précises :
- Problèmes mécanique de positionnement
- Problème de magnétisation des éléments au montage et après montage
momoclic- complétement accro
- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() novice bois Mer 24 Jan 2018 - 19:29
novice bois Mer 24 Jan 2018 - 19:29
dh42 a écrit:salut,
Pour ce genre de choses, il faut demander directement à Sorotec, eux ils pourront te dire ce qui se monte ou pas ... et surtout à quel tarif, car je pense que vue la V de rotation d'un servo il faut une démultiplication par courroie en plus pour les utiliser dans la meilleur plage et gagner du couple, donc d'autres accessoires à payer. (les PàP sont montés en prise directe sur les PFE, idem pour les "closed loop")
++
David
J'ai envoyé un mail à Sorotec, j'espère qu'ils répondront.
je ne saisis pas le servo 1.27Nm et le PàP 3Nm, ça explique quoi ce chiffre en Nm ?
Dernière édition par novice bois le Mer 24 Jan 2018 - 20:50, édité 1 fois
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() momoclic Mer 24 Jan 2018 - 20:20
momoclic Mer 24 Jan 2018 - 20:20
momoclic- complétement accro
- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() dh42 Mer 24 Jan 2018 - 20:39
dh42 Mer 24 Jan 2018 - 20:39
je ne saisi pas le servo 1.27Nm et le PàP 3Nm, ça explique quoi ce chiffre en Nm ?
C'est le couple du moteur.
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Les motorisations
![]() novice bois Mer 24 Jan 2018 - 20:48
novice bois Mer 24 Jan 2018 - 20:48
Donc en valeur absolue le servo 1.27Nm a plus de couple que le PàP 3Nm ?
alors pourquoi payer cette différence de prix pour le servo sinon pour éviter la perte de pas ? Est-ce vraiment la même échelle ?
le couple est vraiment important ? ou alors il y a un truc que j'ai pas pigé ?
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() dh42 Mer 24 Jan 2018 - 21:46
dh42 Mer 24 Jan 2018 - 21:46
Donc en valeur absolue le servo 1.27Nm a plus de couple que le PàP 3Nm ?
Bin non, moins ! ... 1.27Nm c'est plus petit que 3Nm, mais un servo à un couple presque constant en fonction du régime (de 1 à 3000 tr), alors qu'un PàP perd du couple au fur et à mesure qu'il monte dans les tours ; regarde les courbes de couple sur les datasheet des différents moteurs.
le couple est vraiment important ?
Oui, bien sûr, c'est même le plus important dans le choix d'un moteur.
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Les motorisations
![]() novice bois Jeu 25 Jan 2018 - 22:05
novice bois Jeu 25 Jan 2018 - 22:05
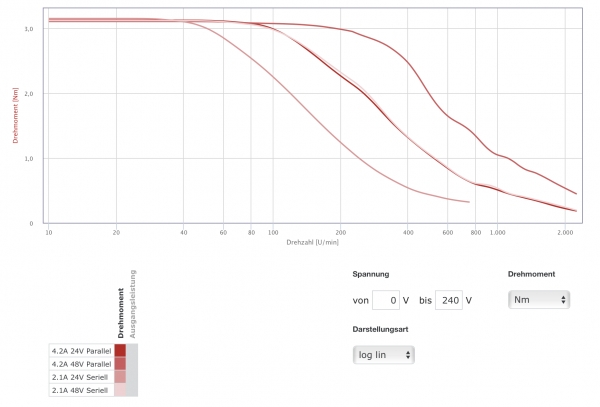
la 1ère: moteur PAP 4.2A
https://www.sorotec.de/shop/Schrittmotor-4-2A-Bipolar---3NM-Nanotec.html
la 2ème: servo moteur "Leadshine Servo Motor 400 Watt / 60 Volt" https://www.sorotec.de/shop/Hybrid-Servo-Motor-20-Nm-6989.html

peux-tu m'expliquer ces courbes, tu m'a parlé de couple, régime et tours
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() momoclic Ven 26 Jan 2018 - 0:11
momoclic Ven 26 Jan 2018 - 0:11
Ces notions n'ont rien de complexes une fois comprise, mais ne sont pas pour autant simples à expliquer. Je me lance :
Le couple : Le couple est une notion qui traduit la force que le moteur fourni dans son mouvement.
Autrefois on utilisait le kgf (kilogramme-force). C'est le poids d'une masse de 1 kilogramme subissant l'accélération de la pesanteur en un lieu donné de la terre et qui a pour valeur g = 9,806 65 m/s2 à Paris.
Aujourd'hui on utilise le Nm, donc 1 kgf/m = 9,81 Nm en arrondissant.
Pour illustrer la notion de couple, voici deux exemples :
- Le cycliste : lorsqu'un cycliste pédale, il appuie davantage sur les pédales pour accélérer ou monter une côte, il développe ainsi davantage de couple.
- Le tourne-vis électrique : parfois, pour visser une vis, il est nécessaire d'utiliser un tourne vis électrique parce que la force de la main ne suffit pas. Le tourne-vis électrique fournit alors un couple, une force, supérieur à celui de la main.
En résumé le couple exprimé en newton.mètre (Nm) est un bras de levier partant du centre de rotation dont la longueur s'exprime en mètres (m) et exerçant à son autre extrémité une certaine force exprimée en newton (N).
La vitesse de rotation : Ici on parle du nombre de tour que le moteur va faire en une minute, on exprime ça en rpm (Rotation Par Minute).
Selon ces caractéristiques un moteur quelqu'il soit, électrique ou thermique, à un couple différent selon sa vitesse de rotation. Grâce à l'électronique des "drivers" et à la conception des moteur électrique on peut piloter certaines caractéristiques de ces moteurs. Voir mon propos à ce sujet plus haut.
Pour en venir aux courbes de la première image, note qu'à gauche, sur le trait vertical, les chiffres représentent le couple en Nm. Sous le trait inférieur sont indiquées les vitesses de rotation en rpm.
Une légende en bas à gauche nous indique que ces moteurs peuvent fonctionner selon deux mode de connexion : Série et Parallèle et sur des tensions pouvant varier de 24 volts à 48 volts, voire plus selon les driver utilisés. Voici donc la raison de ces quatre courbes.
Pour aider à comprendre je ne parlerais que de la dernière : le mode série, en 48 volts qui nécessite un driver acceptant une intensité de 2,1 ampères.
Note au passage une caractéristique spécifique aux moteurs pas-à-pas que lorsque que sa vitesse est de zéro il dispense déjà plus de 3 Nm, bien sur à la condition d'être alimenté via le driver.
Cette caractéristique apporte le bonheur à l'usineur sur une CN, puisque très souvent on bloque un axe pour faire travailler les deux autres (Z bloqué, X et Y tournant pour usiner une forme par exemple).
- On remarque sur cette courbe que le couple reste supérieur ou égal à 3 Nm jusqu'à 200 rpm.
- A 1000 rpm le couple tombe à environ 1Nm et on peu estimer qu'à 500 rpm il est encore de 2 Nm.
- On voit bien ici le comportement classique d'un moteur pas-à-pas qui donne son couple maxi à l'arrêt et le perd au fur et à mesure que le vitesse de rotation augmente.
On note aussi que l'usage d'une tension plus élevée, sur les moteurs pas-à-pas, assure une plus grande vitesse de rotation.
Courbes de la seconde image : On retrouve ici la même logique que la courbe précédente, à ceci près que les deux axes sont permutés.
Première remarque, la vitesse beaucoup plus élevée et ensuite une beaucoup plus grande constance du couple aux vitesse rapide.
Ce sont bien là des caractéristiques communes aux servomoteurs.
Les deux courbes sont justifiées, courbe A, pour une utilisation permanente à 1,2 Nm et par intermittence, courbe B, on peut atteindre plus de 3,5 Nm jusqu'à 3000 rpm.
L'overload ratio ou taux de surcharge est pour moi une notion méconnue dans ce cadre. Je tente cependant de l'interpréter. On me corrigera au besoin
En fonction de la vitesse de rotation indiqué en milliers de tours au bas de la courbe, on peut extrapoler les temps pendant lesquels on peu appliquer une charge. Ce travil de limitation du temps de surcharge me semble dévolu au driver.
Ceci ne me semble pas très clair, il faudrait un peu plus d'explication ...
Ces deux images mettent parfaitement en évidence les modes de fonctionnement des deux technologies.
Il appartiendra à chacun de choisir le type de moteur qui correspond à sont projet et à son budget.
momoclic- complétement accro
- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() novice bois Ven 26 Jan 2018 - 20:01
novice bois Ven 26 Jan 2018 - 20:01
mais pour le reste
Voyons, si j'ai 2 CNC côte à côte, une avec les PAP et l'autre avec les servos, sans parler prix. Quels sont les conséquences ? les avantages ? le confort ?
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() momoclic Ven 26 Jan 2018 - 20:54
momoclic Ven 26 Jan 2018 - 20:54
La sur-qualité d’un composant du projet à un impact direct sur le bubget. Donc avant de choisir une technologie il faut définir un cahier des charges le plus précis et exhaustif possible. En parallèle on lui adjoint la limite budgétaire qui devra prendre en compte d’éventuels imprévus.
Lorsque que ce cahier des charges est précisé on commence par choisir l’architecture à mettre en œuvre. Ensuite faire un inventaire des moyens et outillages à notre disposition.
Un élément souvent omis, sourtout si on désir un minimum de précision, la métrologie. Il faudra éventuellement prévoir le budget en conséquence.
Quand tout cela est clair on dessine le projet et rapidement en consultant catalogues et à l’aide de quelques calculs on trouve LE produit qui convient.
L’alternative c’est de partir de l’expérience des autres, des machines réalisées ou des composants utilisés.
Dans tous ces cas un outil aujourd’hui incontournable, en plus des forums : le moteur de recherche !
momoclic- complétement accro
- Messages : 801
Points : 809
Date d'inscription : 12/10/2016
Age : 76
Localisation : Ancenis-Nantes
Re: Les motorisations
![]() dh42 Sam 27 Jan 2018 - 2:06
dh42 Sam 27 Jan 2018 - 2:06
La force nécessaire au déplacement et à l'accélération d'un axe dépend de sa masse et de l'accélération souhaitée. Cette force est transmise par un système rotatif (le moteur). On parle de couple, car la force au bout du "bras de levier" que représente la distance entre le centre de l'axe moteur et le point d'application de la force (les filets/billes de la vis), dépend non seulement du couple du moteur mais aussi de la longueur de ce bras de levier.
Par ex: un moteur ayant un couple de 1Nm (Newton / mètre), fournira une force de 1N à l’extrémité d'un bras de levier de 1m ... si ce bras de levier est 10x plus court, cette force sera de 1Nm/0.1m = 10N
Si on prend l'exemple d'une CNC, avec un moteur de 1Nm et une vis de Ø16mm, le "bras de levier" est ~ égale au rayon de la vis, soit 8mm, le moteur fournira donc une force de 1/0.008 = 125N au niveau du filet de la vis. Si avec le même moteur tu a une vis de Ø 32mm, le bras de levier étant 2x plus important, tu aura 2x moins de forces au niveau des filets avec le même moteur. (1/0.016)
Dans le cas d'une BZT par exemple, le constructeur à probablement calculé la couple mini nécessaire au fonctionnement des axes avec les valeurs d'accélération et V maxi supportables par la mécanique. On peut penser que ce couple est d'environ 1Nm.
Dans ce cas, il faut donc que le moteur ai toujours un couple d'au moins 1Nm quelque soit sa V de rotation ... dans le cas du servo, le couple est presque constant de 1 à 3000Tr/min, donc un moteur avec un couple de 1.27 suffit. Un PàP par contre n'a pas du tout un couple constant, on choisis donc un moteur dont le couple à la V maxi que l'on compte utiliser soit suffisant. Dans ce cas, un PàP qui à encore 1Nm de couple à 800 tr/min, c'est un PàP de 3Nm (à sa V mini)
Intéret du servo:
Il tourne plus vite, donc possibilité d'avoir des V de déplacement plus importantes de tes axes (avec un PàP sur une PFE, la V maxi en XY est de l'ordre de 8000 mm/min)
Il peut s’arrêter sur un plus grand nombre de positions: ex avec un PàP tu 400 positions d'arrêt par tour au maxi, donc avec des vis au pas de 10 comme sur une PFE, ça donne 10/400 = 0.025m (2.5/100ieme de mm) ... avec un servo + encodeur 2500pt, tu aura 2500 positions d'arrêt par tour, donc tj avec des vis de 10 10/2500=0.004mm (0.4/100 ieme = 4 microns). Dans le cas d'usinage mécanique, cette précision supplémentaire est utile mais ça n'a guère de sens sur une machine destinée à usiner du bois et dont le châssis, de toute façon, ne permet pas de travailler au 1/100ieme, et encore moins au micron.
Sur un PàP standard, il n'y a pas de retour d'info vers le driver, donc si le PC dit au moteur de tourner d'un tour et que pour une raison ou une autre il ne le fait pas (perte de pas, blocage mécanique, ..) le driver ne saura pas que l'axe n'est pas arrivé à la position prévu et la suite de ton usinage sera décalée.
Avec un encodeur, il y a un retour d'info, donc si le moteur n'a pas tourné de la valeur prévue, le drivers en est informé et corrige la situation ou, si il ne peut pas, arrête la machine.
Les PàP avec encodeurs (closed loop) permettent d'avoir ce retour d'info, mais leurs autres caractéristiques sont identiques au PàP ordinaires.
A mon avis il n'y a guère d’intérêt à se ruiner pour des servos sur une PFE de 1.5m de course, les hautes vitesses de déplacement ne deviennent vraiment utiles que sur des machines de grande taille.
A la limite, si tu est riche, tu peux choisir des PàP + encodeurs, autrement dit, la version "closed loop" afin d'avoir une sécurité en cas de perte de pas, mais je ne crois pas qu'un seul possesseur de BZT sur le forum utilise autre chose que des PàP ordinaires. (ou si c'est le cas, ça n'a pas été précisé)
Concernant le couple des moteurs sur les PFE: c'est des 3Nm - 4.2A (PàP) sur les modèles qui ont un Z standard ( course de 135mm) et des 4.5Nm - 6A sur XY et 3Nm sur Z sur les versions qui ont un Z rehaussé (course 250mm)
http://www.bzt-cnc.de/en/shop/electronics/15-motoren
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Les motorisations
![]() novice bois Sam 27 Jan 2018 - 19:33
novice bois Sam 27 Jan 2018 - 19:33
là j'ai vraiment tout compris, merci David
Au vu du nombre de lecture, je ne doit pas être le seul novice ou passionné à chercher des réponses. Je sauvegarde ce cours précieusement ainsi que celui de momoclic qui nous à fait une super présentation
 .
.David, tu donnes la référence chez bzt, mais je ne l'a trouve pas chez sorotec.
Je ne trouve que ceux-là https://www.sorotec.de/shop/CNC-Steuerungstechnik/Schrittmotoren/
Ce n'est pas la même référence
Faut t-il acheter chez bzt ?
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois
Re: Les motorisations
![]() dh42 Sam 27 Jan 2018 - 20:16
dh42 Sam 27 Jan 2018 - 20:16
David, tu donnes la référence chez bzt, mais je ne l'a trouve pas chez sorotec.
Non, ils ne font pas cette marque.
Je ne comprends pas trop ; si tu achète une PFE, les moteurs sont déjà dessus (les PàP sont compris dans le prix de base de la CN)
++
David
_________________
Traduction Française de CamBam et de sa documentation.
dh42- Admin
- Messages : 25661
Points : 38370
Date d'inscription : 21/06/2009
Age : 60
Localisation : Près de St Etienne (42) -
Re: Les motorisations
![]() novice bois Sam 27 Jan 2018 - 20:27
novice bois Sam 27 Jan 2018 - 20:27
novice bois- posteur Régulier
- Messages : 130
Points : 200
Date d'inscription : 10/05/2014
Age : 59
Localisation : Aulnay-sous-bois